

Automobile path tracking control method based on corner optimization sequence
A technology for optimizing sequences and path tracking, which is applied to control devices and other directions, and can solve problems such as path tracking failures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0100] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
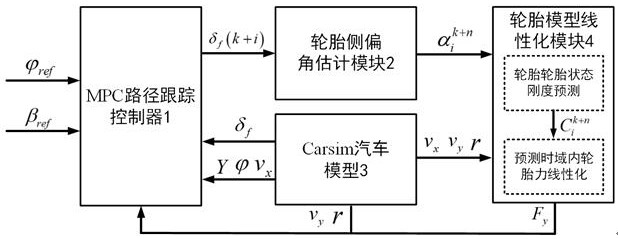
[0101] figure 1It is a system structural diagram of a path tracking control method based on an optimized corner sequence in the present invention, the system mainly includes an MPC controller 1, a tire slip angle estimation model block 2, a CarSim vehicle model 3 and a tire model linearization module 4; The side slip angle estimation model fast 2 is used to estimate the tire side slip angle sequence in the prediction time domain; the tire model linearization module 4 is used to realize the linear approximation of the nonlinear tire force in the prediction time domain; the CarSim car model 4 is used to output the actual State quantities, including vehicle longitudinal velocity, lateral velocity, yaw rate, yaw angle, and lateral displacement; MPC controller 1 solves the vehicle’s state quantity according to the desired lateral displacement, center-of-ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More