

Attitude Estimation Method Combining UAV Dynamics Model and MEMS Sensors
A mechanical model and attitude estimation technology, applied in the field of UAV navigation, to improve the estimation accuracy, avoid software simulation calculation or a large number of wind tunnel tests
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings and examples. It should be understood that the following examples are intended to facilitate the understanding of the present invention, and have no limiting effect on it.
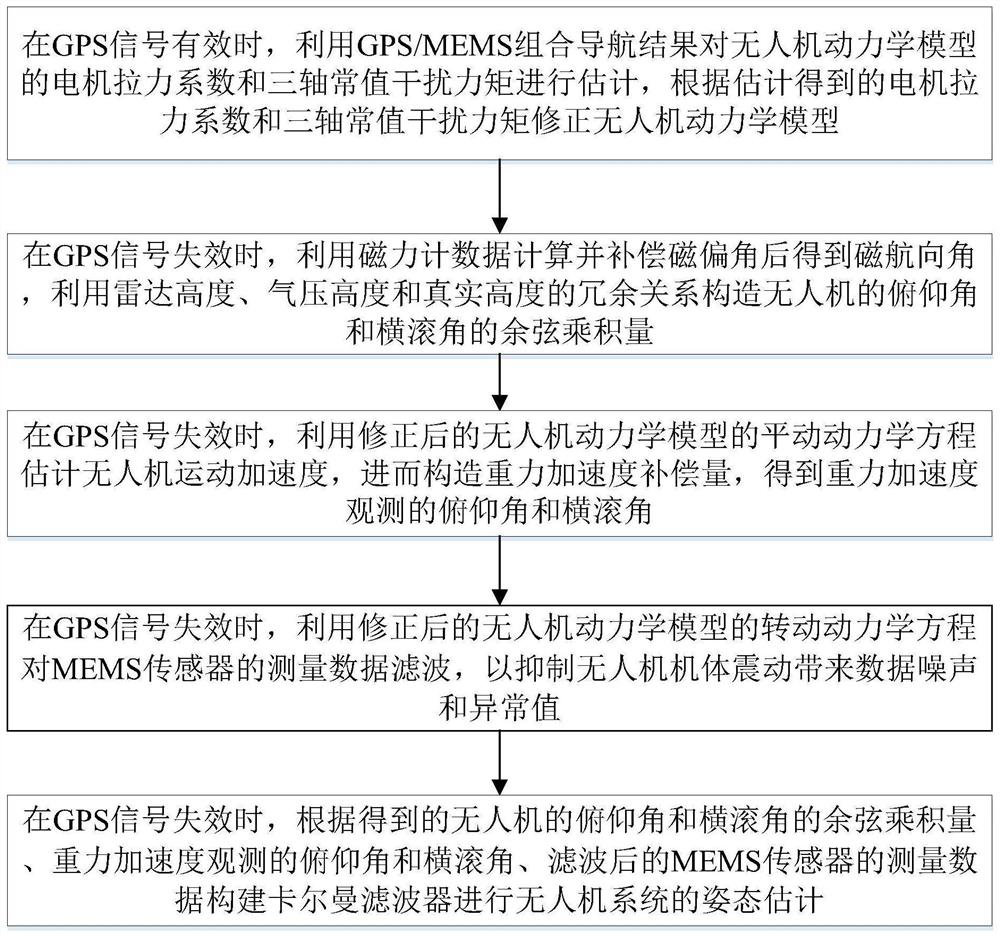
[0061] Such as figure 1 Shown, the attitude estimation method of the present invention in conjunction with unmanned aerial vehicle dynamics model and MEMS sensor, comprises the steps:
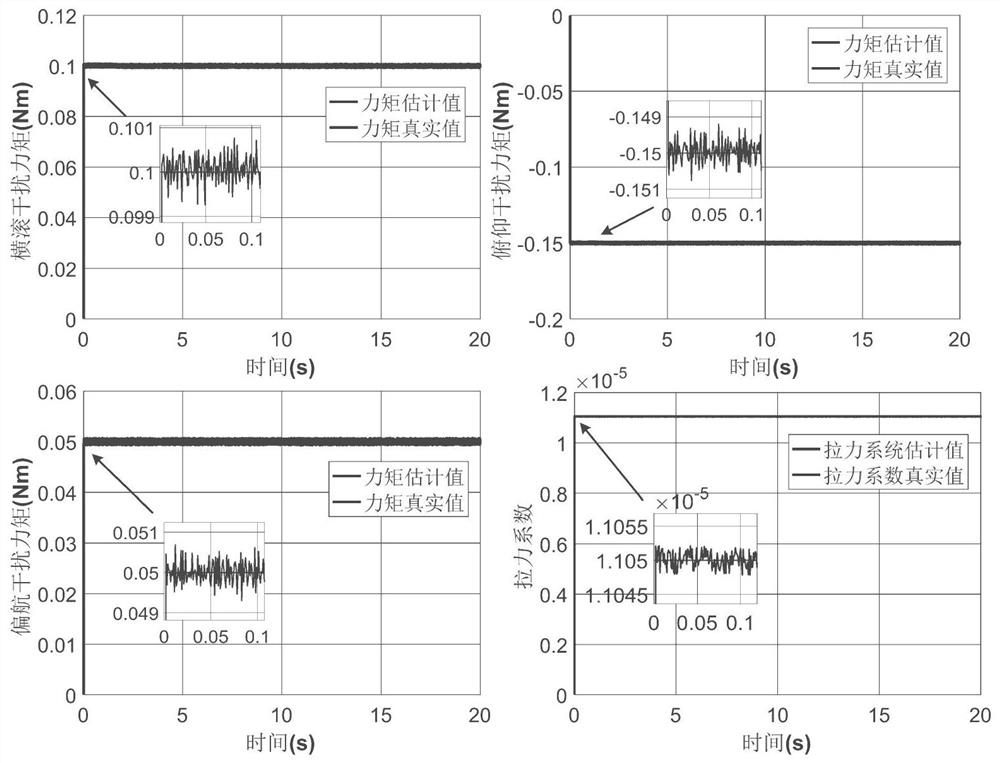
[0062] Step 1: When the GPS signal is valid, use the GPS / MEMS integrated navigation results to estimate the motor pull coefficient and the three-axis constant disturbance torque of the UAV dynamic model, and according to the estimated motor pull coefficient and the three-axis constant disturbance torque Corrected drone dynamics model.
[0063] The following formula (1) gives the state quantities for estimating the motor pull coefficient and the three-axis constant disturbance torque and the nonlinear equation of sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More