Night target detection method based on millimeter wave radar and vision fusion
A millimeter-wave radar and target detection technology, applied in the field of unmanned driving environment perception, can solve the problems of complex driving environment at night and the impossibility of unmanned driving, etc., and achieve the effects of reduced calculation, high reliability, and rich image information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. It should be understood that the preferred embodiments are only for illustrating the present invention, but not for limiting the protection scope of the present invention.
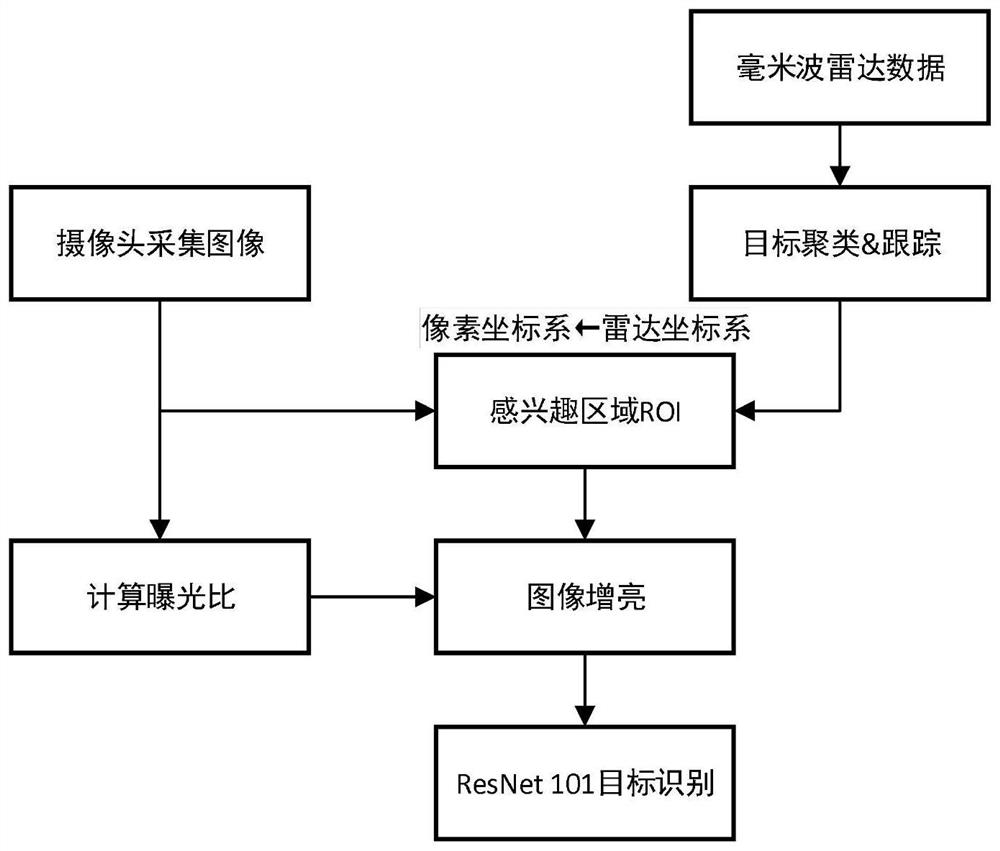
[0066] This embodiment proposes a night target detection method based on millimeter-wave radar and visual fusion. This method can detect various traffic participants such as pedestrians, automobiles, motorcycles, and bicycles in the area of interest, such as figure 1 As shown, specifically:
[0067]Carry out camera calibration, establish the relationship between the image pixel coordinate system and the world coordinate system, establish the conversion relationship between the radar coordinate system and the world coordinate system according to the installation position of the radar, and establish the conversion relationship from radar coordinates to image pixel coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More