

Instant positioning and map construction system and method with semantic perception
A map construction and semantic technology, applied in neural learning methods, neural architecture, image enhancement, etc., can solve problems such as inability to obtain camera pose information, tracking failure, and blurred absolute scale of the reconstructed scene
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific example
[0125] Specific example: This scheme can be applied to 3D point cloud reconstruction with semantic information in road scenes
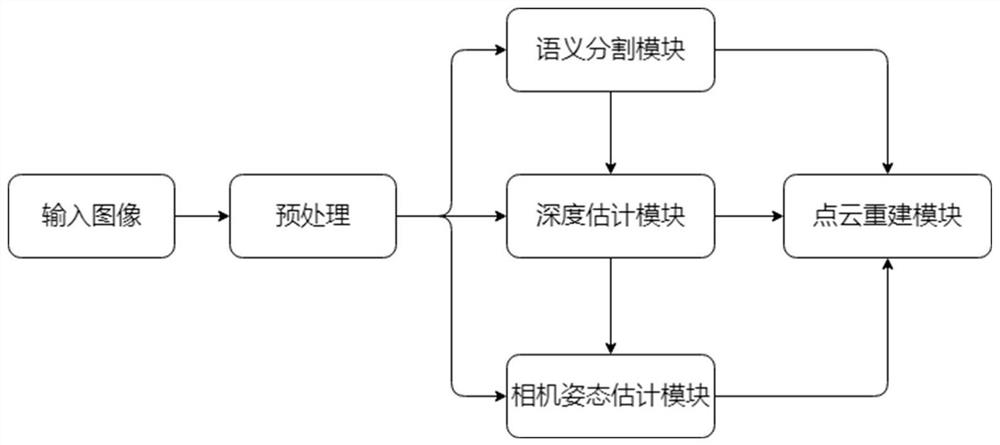
[0126] Such as figure 2 and 3 As shown, it is implemented in real-shot campus roads and urban roads of the KITTI dataset. First, the input image is preprocessed and then sent to the depth prediction module and semantic segmentation module.
[0127] The depth estimation module uses a depth estimation network based on Light-Weight-RefineNet as the backbone, and trains the network on the KITTI set, which contains 20697 images with depth annotations. 20000 images are used for training and 697 images are used for testing. Compared with other advanced depth estimation models, this algorithm has fewer parameters and floating-point calculations. The number of parameters is only 2.99M, and the accuracy has not declined. It is very in line with the real-time performance required by the SLAM system. A single 1200x350 resolution Image processing takes only 17...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More