

GIL leg installation punching method and punching robot
A technology of robots and multi-joint robots, applied in manipulators, program-controlled manipulators, workshop equipment, etc., can solve problems such as low efficiency and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
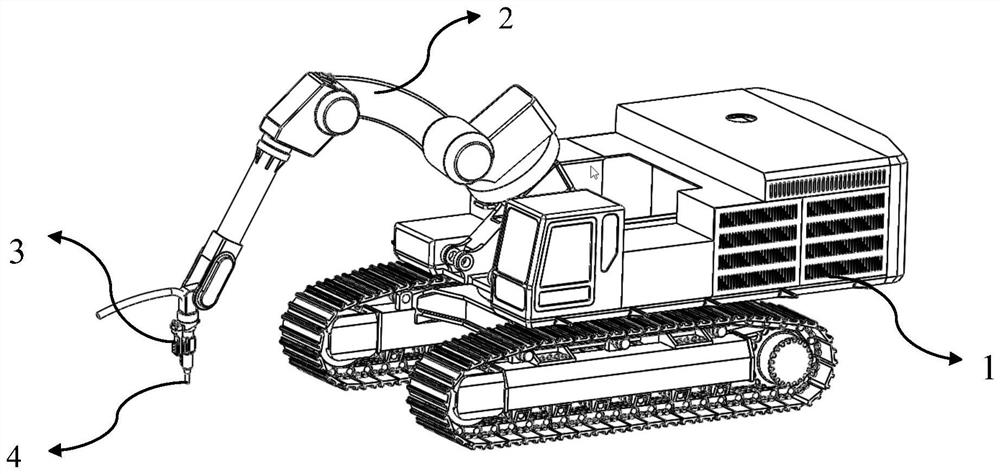
[0022] Such as figure 1 As shown, the punching robot mainly consists of a multi-mode walking chassis vehicle 1, a multi-joint robot 2 installed on the multi-mode walking chassis vehicle 1, an industrial vision system 3 fixed on the arm of the multi-joint robot 2, and a multi-joint robot fixed on the multi-joint robot. The drilling machine 4 at the end of the arm of the robot 2 is composed; the industrial vision system 3 mainly includes a camera system, a computing system and a light source system. Utilize described punching robot to be able to finish following work:
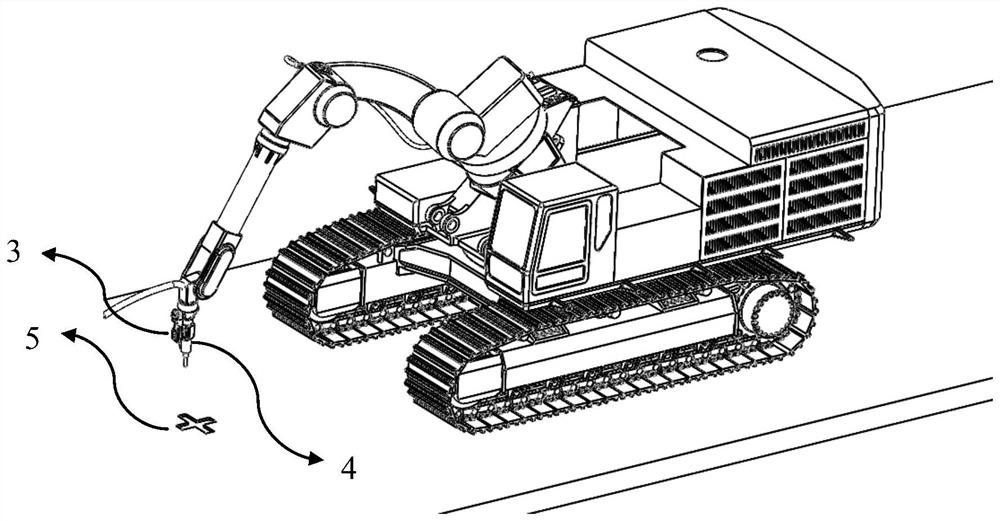
[0023] Step1 Workers draw lines on the hardened ground according to the GIL construction drawings, determine the positions of the holes and mark the hole positions 5;
[0024] Step2 The drilling robot moves to the working area driven by the multi-mode walking chassis vehicle 1;
[0025] Step3 industrial vision system 3 takes pictures of the hole site 5 (such as figure 2 shown);
[0026] Step4 The multi-joint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More