Multi-azimuth detection and multi-angle intelligent obstacle avoidance method for unmanned aerial vehicle
An intelligent obstacle avoidance and unmanned aerial vehicle technology, which is applied to radio wave measurement systems, satellite radio beacon positioning systems, measuring devices, etc. The effect of high detection accuracy and a wide range of environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
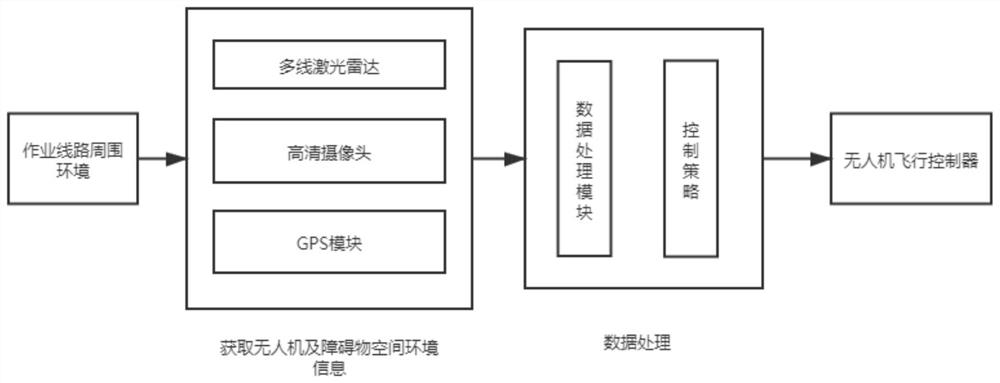
[0047] The technical solutions of the present invention are further specifically described below by way of examples and in connection with the accompanying drawings. EXAMPLES: A multi-orientation method of the drone, multi-angle intelligent avoidance method, such as figure 1 As shown, including the following steps:
[0048](1) Distance measurement by a laser radar. Multi-lidar lidar, while scanning frequency of 8,000 times per second to achieve a 360 ° scanning in two directions. Multi-lidar can be performed simultaneously on the conductor 360 ° scan, the tree barrier in both directions and the surrounding environment, to obtain a relative distance and orientation of an obstacle around the scanning laser radar week. Multi-lidar obstacle continuously transmitted to a target laser beam, then receives the reflected beam sensor, by detecting the emission time of a laser beam to return thereby to obtain distance to the obstacle is passed. Multi-lidar measurement data obtained from the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com