

Intention priority fuzzy fusion control method for brain-controlled vehicle
A control method and a technology of fuzzy fusion, applied in the control field of brain-controlled vehicles, can solve the problems of modeling and complexity, and achieve the effect of improving the degree of participation, improving the control performance, and ensuring the control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
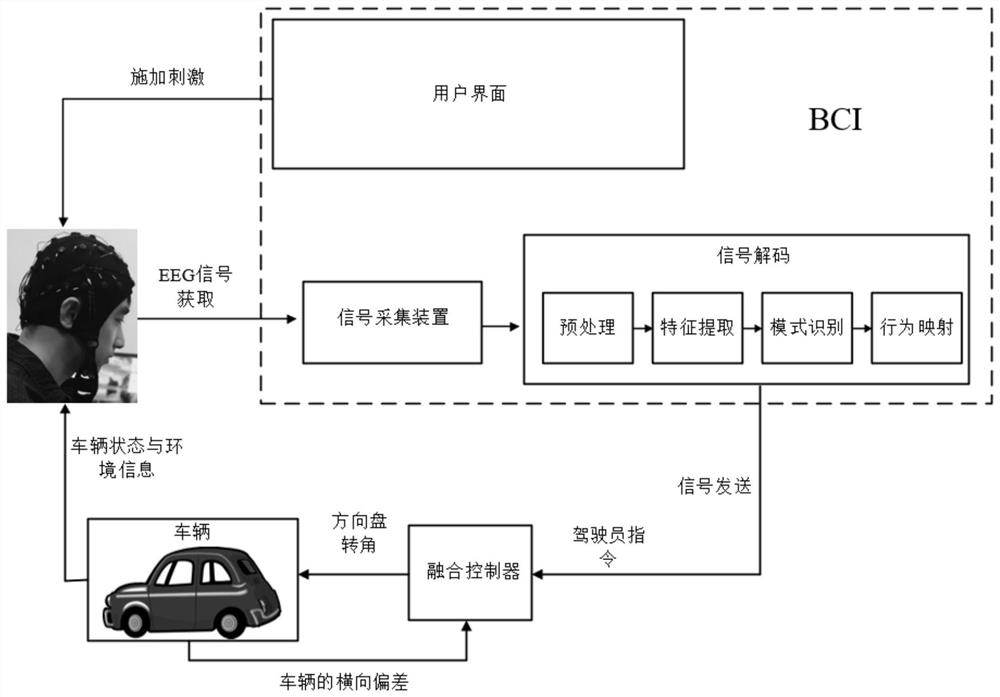
[0034] Example: The present invention designs a set of BCV lateral control system based on shared control, such as figure 1 Shown. The BCI type selected in this embodiment is an improved SSVEP-SSMVEP (brain-computer interface for steady-state motor evoked potential based on rotational visual perception). The overall work flow is: First, the brain-controlled driver decides a steering command (steering wheel to the left, steering wheel to the right, and steering wheel to hold) based on vehicle status and environmental information. Then the driver generates EEG signals representing three steering commands by looking at three patterns with different rotation frequencies in the user interface. The left, center, and right patterns correspond to turn left, hold, and turn right respectively. 3 paradigm patterns such as image 3 Shown in the upper left part of the. Then the EEG signal is collected by the collecting device, and the collected EEG signal is sent to the fuzzy brain-contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More