

Monocular and binocular combined type high-voltage transmission line hardware fitting online identification and positioning system and method
A high-voltage transmission line, identification and positioning technology, applied in control/regulation systems, overhead lines/cable equipment, two-dimensional position/channel control, etc., can solve problems such as fitting identification and distance measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
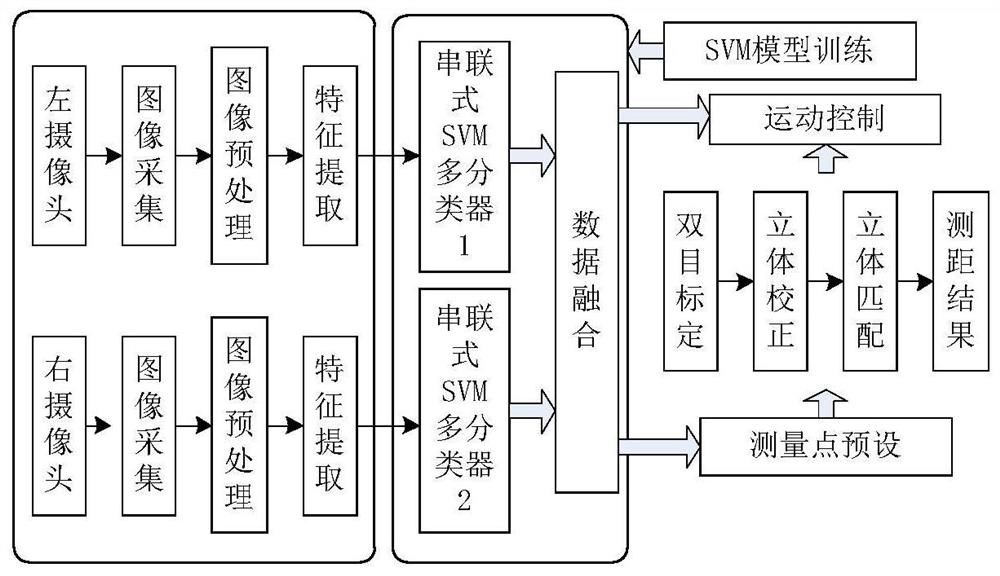
[0036] A method for identifying and locating overhead high-voltage transmission lines combining single and binocular figure 1 , figure 2 , image 3 As shown, the implementation process includes:
[0037] S1. Image acquisition along the high-voltage transmission line;
[0038] S2. Using the image collected in step S1 to perform SVM model training;
[0039] S3. Using the obstacle real-time ranging technology based on the target characteristics to establish a database of preset measurement points for obstacle fittings;
[0040] S4. Use binocular cameras to build a visual processing platform, and collect images along the route;
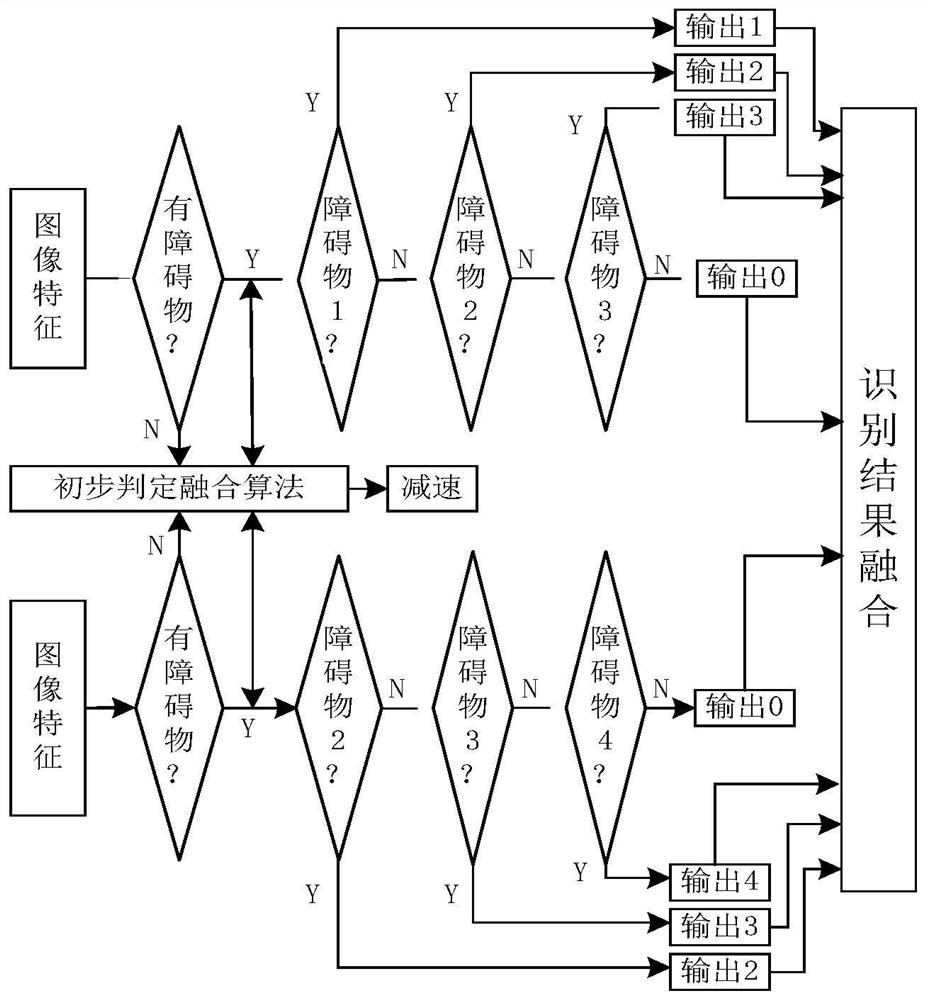
[0041] S5. Through the obstacle recognition method based on the SVM multi-cycle multi-classification of the binocular camera, the obstacle type in the image of step S4 is identified;
[0042] S6. According to the obs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More