

Automatic harvesting method for lodging crops and harvester
A harvester and crop technology, applied in harvesters, neural learning methods, cutters, etc., can solve the problems of decreased harvesting quality, long cycle, inaccurate maps, etc., to improve harvesting quality, increase yield, and computing power requirements. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
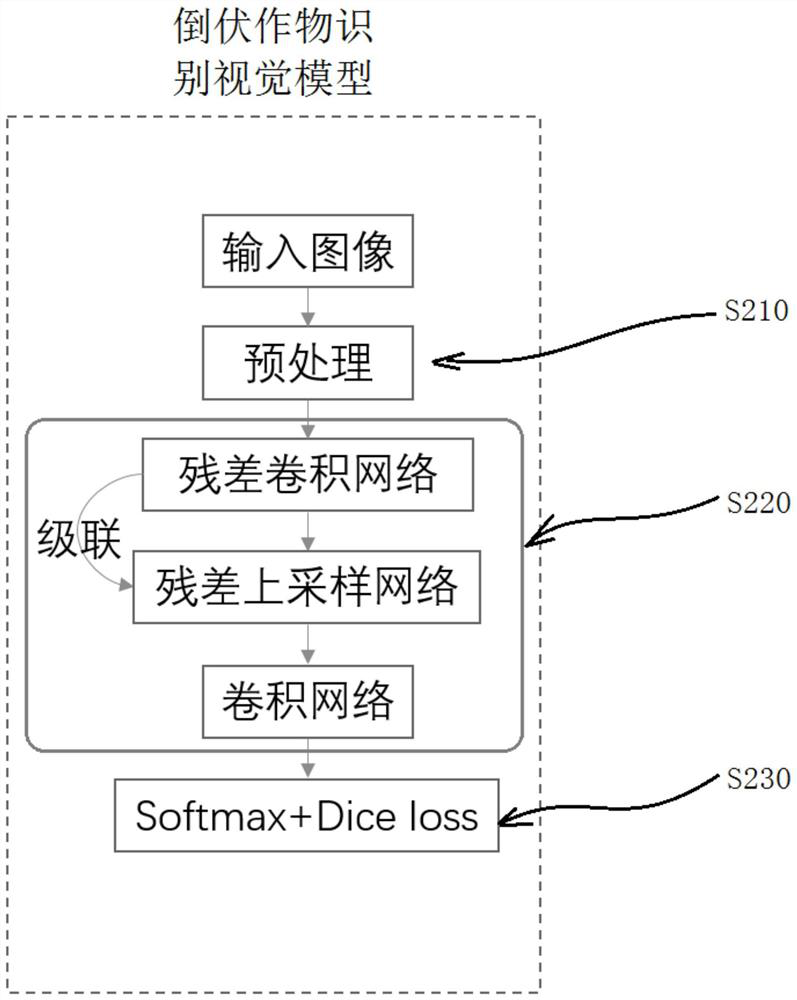
[0086] Embodiment 1: Crop lodging recognition visual model training process
[0087] The training process of the lodging recognition visual model mainly consists of the following steps.
[0088] 1) The input image consists of two parts: lodging data and data defined and labeled by lodging standards.
[0089] a. Lodging data collection. According to the original intention of the present invention, the crop lodging recognition visual model is mainly to learn the harvesting experience of the harvester driver, so it is necessary to install a tool with image capture capabilities such as a camera on the front of the harvester, such as a windshield, to select a plot with lodging Harvesting, collecting pictures of lodging areas of various shapes.
[0090] b. Definition and labeling of lodging standards. Because the segmentation model is selected, it needs to be marked with pixels, and a closed-loop area is drawn in the image. In the new layer, the value of this area is 1, and the v...
Embodiment 2
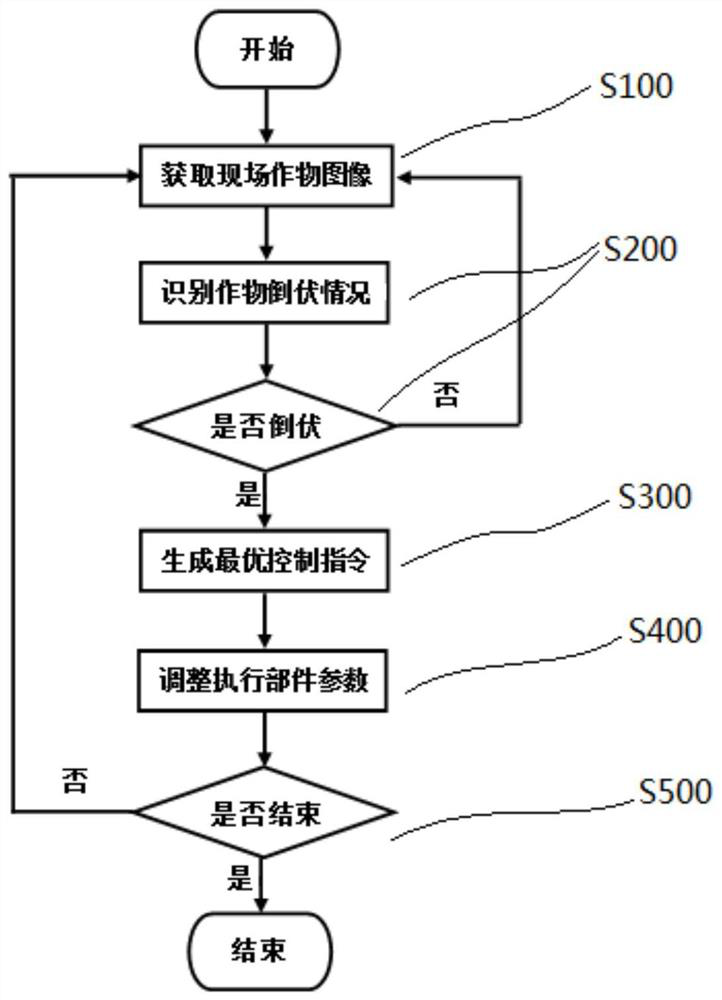
[0099] Embodiment 2: the implementation process of the method for automatic harvesting of lodging crops
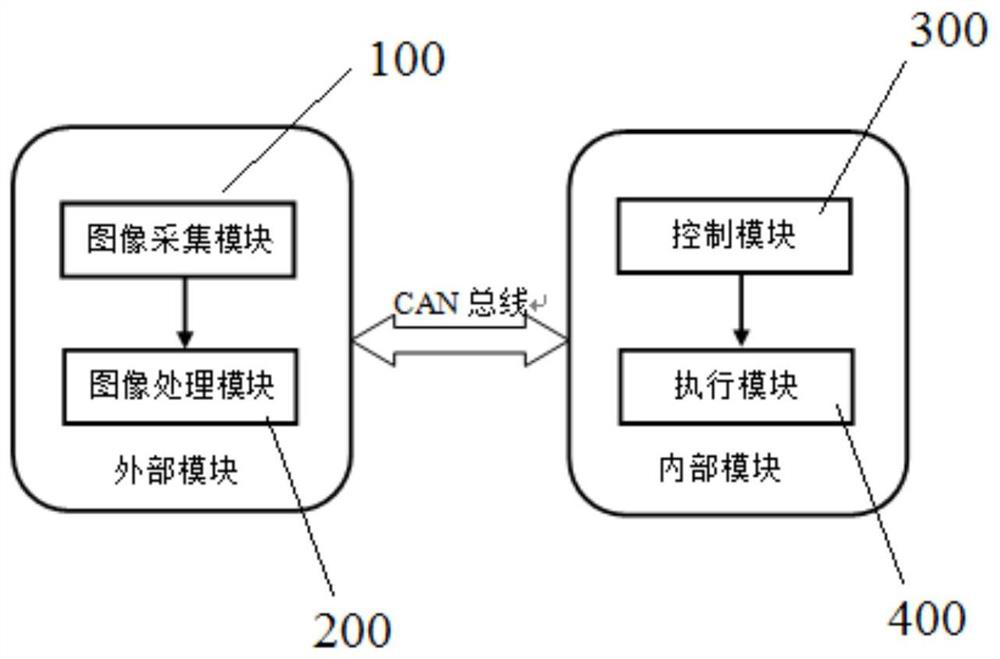
[0100] The automatic harvesting method of lodging crops is the key technology to realize intelligent unmanned operation. The trained crop lodging recognition visual model is deployed to the vehicle computing terminal, assembled to the harvester and cooperated with the vehicle controller to realize real-time unmanned operation. The main steps are: real-time acquisition of images in front of the operation, calculation of lodging ratio, and operation parameter adjustment instructions issued by the vehicle controller.
[0101] 1) The image in front of the operation is acquired in real time. During the training of the perception model, it was found that a single frame of image is not enough to accurately determine the proportion of lodging ahead, and whether it is necessary to adjust the operation parameters. Therefore, it is necessary to maintain at least 5fps (frames per seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More