

Self-adaptive wall-climbing robot for complex environment
A wall-climbing robot and complex environment technology, applied in the field of robotics, can solve the problems of high energy consumption, weak adsorption capacity, and high manufacturing cost of independent gas distribution schemes, and achieve the effects of improving overall battery life, reducing gas loss, and strong elasticity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to facilitate the understanding of the present invention, the present invention will be described more fully and in detail below in conjunction with the accompanying drawings and preferred embodiments, but the protection scope of the present invention is not limited to the following specific embodiments.
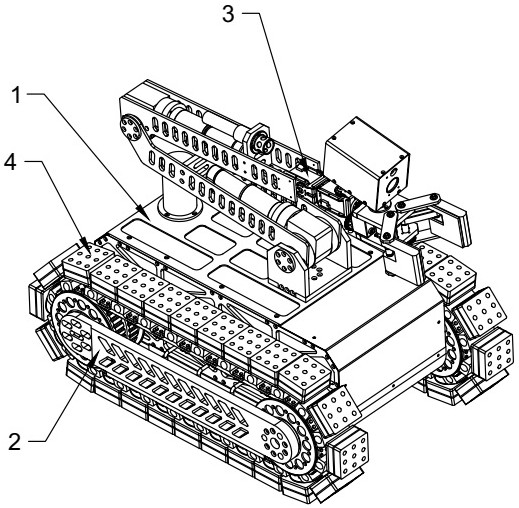
[0031] Such as figure 1 As shown, the self-adaptive wall-climbing robot for complex environments in this embodiment includes a robot body, a working unit 3, a multi-porous self-adaptive suction cup 4, a gas distribution mechanism, and a vacuum generating mechanism. The robot body includes a body 1 , a crawler running mechanism 2 installed on both sides of the body 1 , a power system and a transmission system for driving the crawler running mechanism 2 .
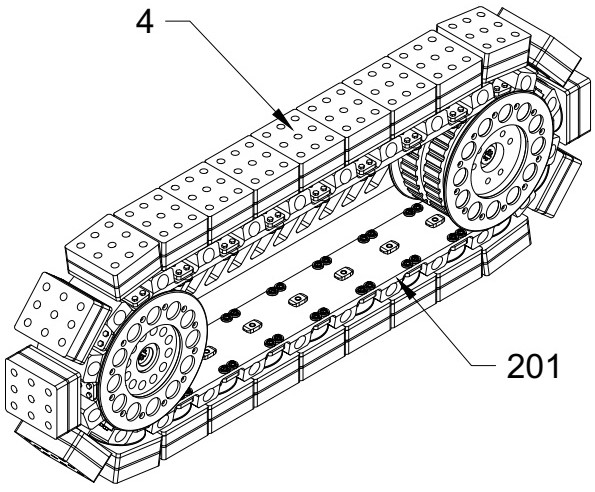
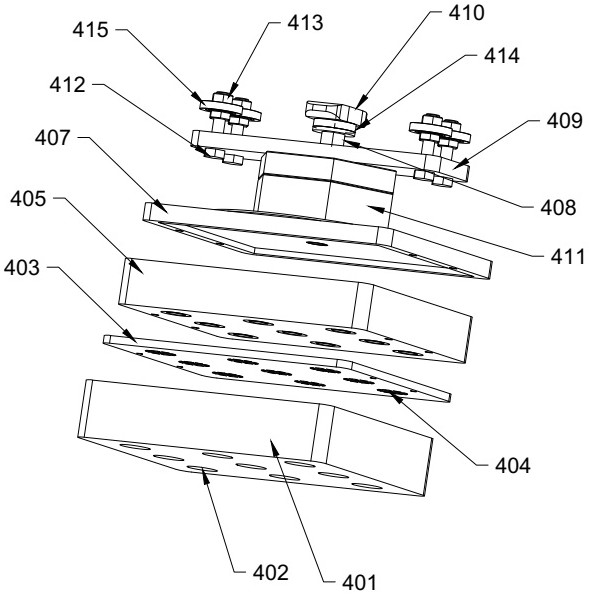
[0032] Such as Figure 2-Figure 4 As shown, the porous adaptive suction cup 4 is densely distributed on the crawler belt 201, and the porous adaptive suction cup 4 includes a porous flexible adsorption plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More