

Camera calibration method based on Levy flight and mutation mechanism grey wolf optimization
A camera calibration and camera technology, applied in the direction of specific mathematical model, image analysis, image data processing, etc., can solve problems such as poor convergence, easy to fall into local optimal solution, sensitive initial value, etc., and achieve good stability and accuracy , Improve the calibration accuracy, improve the effect of calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
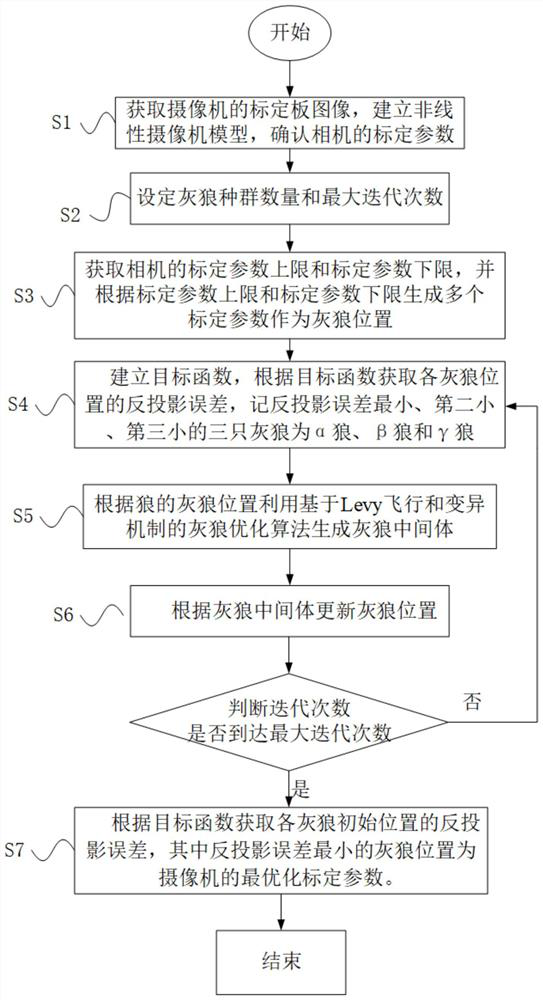
[0045] A camera calibration method optimized by gray wolf based on Levy flight and mutation mechanism, such as figure 1 As shown, the method includes the following steps:
[0046] S1: Acquire the calibration plate image of the camera, establish a nonlinear camera model, and confirm the calibration parameter X of the camera.
[0047] The image of the calibration plate in the present invention is a checkerboard image with multiple corner points on the image.
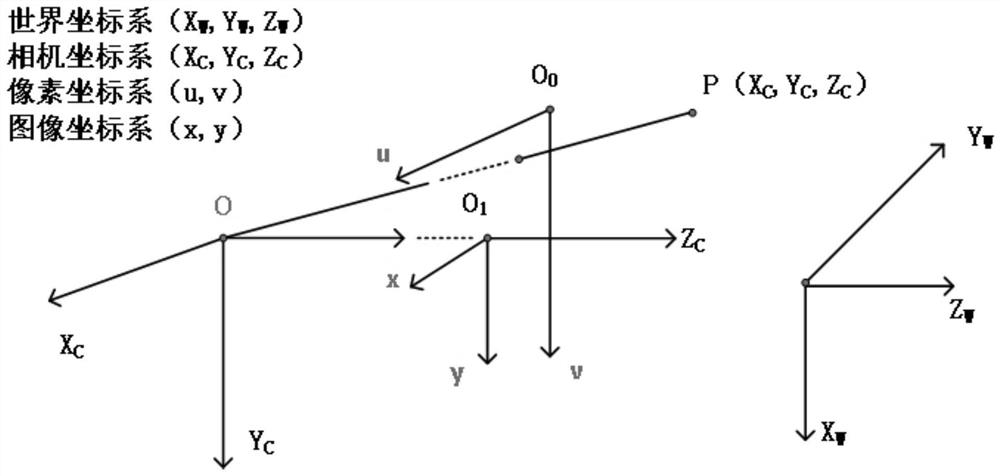
[0048] The nonlinear camera model mainly reflects the process of the camera taking pictures of the real 3D world. If the distortion factor is not considered, it can be simply regarded as a pinhole imaging model. The nonlinear camera model involves such as figure 2 The coordinate system shown:
[0049] 1) World coordinate system (X W ,Y W ,Z W ): Or it can be called a measurement coordinate system, which is an orthogonal three-dimensional 3D Cartesian coordinate system established based on a certain object that exists...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More