

Soft finger capable of realizing segmented bending by utilizing giant electrorheological fluid
A giant electrorheological fluid and software technology, which is applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of complex structure, single working configuration and small grasping range of pneumatic soft hands, so as to ensure strength and stability, Large grabbing range, realizing the effect of variable stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
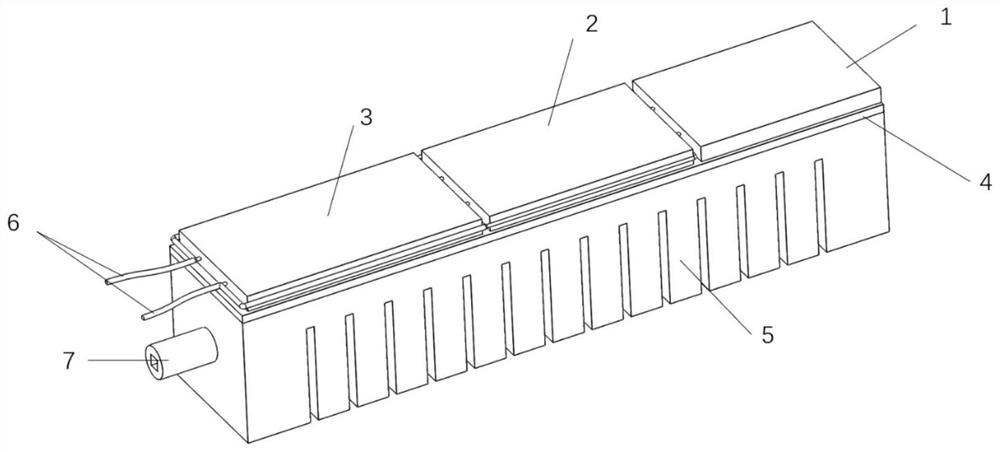
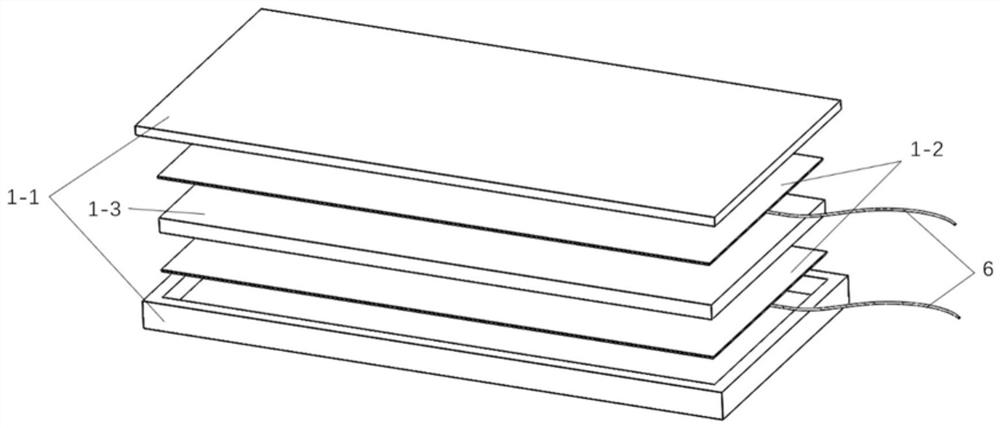
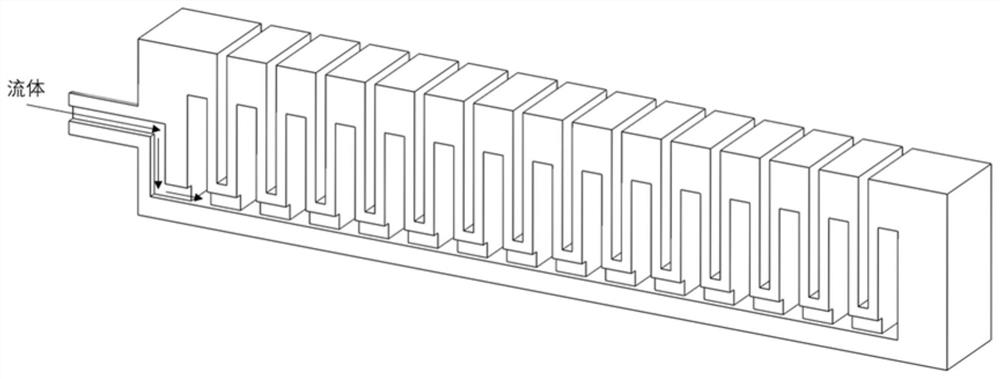
[0032] see figure 1 , figure 2 , image 3 and Figure 4, the soft finger using giant electrorheological fluid to realize segmental bending provided by the present invention, the soft finger includes a bellows 5, an airway 7, a plurality of wires 6, a constraining layer 4 and a plurality of variable stiffness layers, the airway 7 is arranged at one end of the bellows 5 . The bellows 5 is fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More