

Indoor pedestrian following and obstacle avoidance method based on UWB and laser radar
A technology of laser radar and pedestrians, which is applied in two-dimensional position/channel control, non-electric variable control, instruments, etc., can solve the problems such as the large influence of light, the target must appear in the field of vision, and the inability to actively avoid obstacles. safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
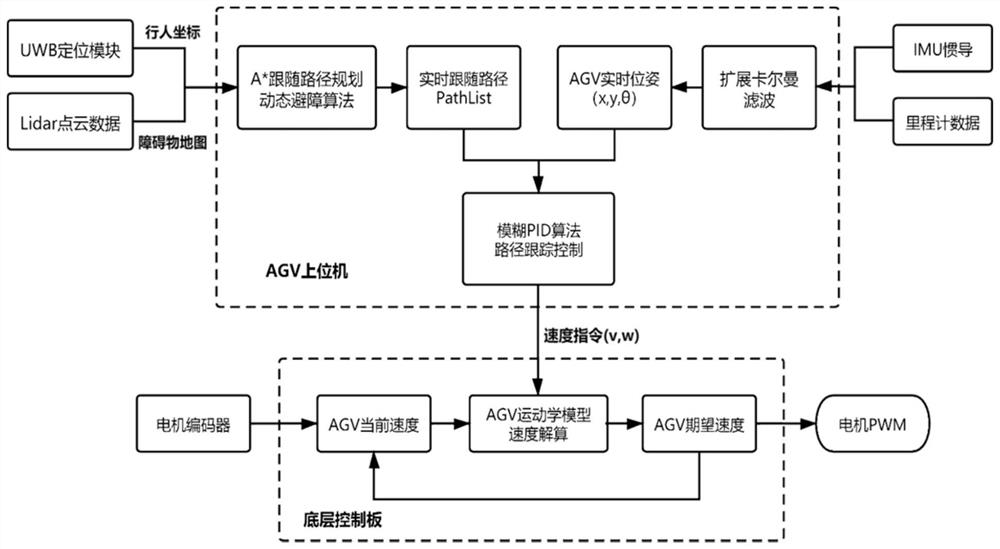
[0051] Such as figure 1As shown, the present invention provides an indoor pedestrian following and obstacle avoidance method based on UWB and laser radar, which specifically includes the following steps:
[0052] S1. Obtain the relative coordinates of the hand-held beacon pedestrians from the AGV vehicle UWB module, use the laser radar to obtain the surrounding obstacle information, and send the pedestrian coordinates and obstacle information to the host computer in real time.
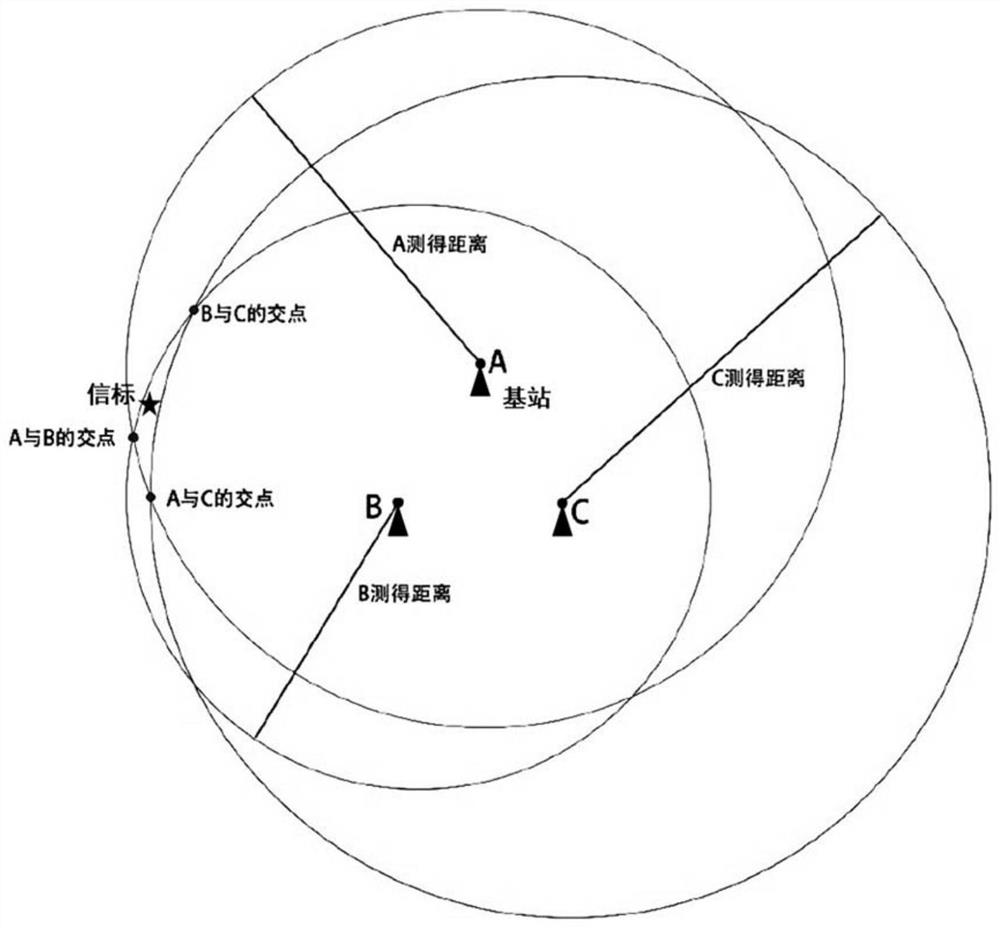
[0053] Specifically: the followed pedestrian needs to hold the beacon. The UWB module obtains the distance and angle of the pedestrian’s hand-held beacon through the bilateral two-way ranging (SDS-TWR) algorithm, and then projects the distance on the AGV’s own coordinate axis to obtain the relative coordinates of the pedestrian. UWB The positioning of the module positioning is achieved through three base stations. The relative coordinates of pedestrians are the target points of path planning. When the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More