

Vision-based robot following method and following robot
A robot and vision technology, applied in the field of computer vision, can solve the problems of high requirements for real-time detection computing power and bandwidth, and achieve the effect of reducing equipment computing power, reducing power consumption, and ensuring real-time accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
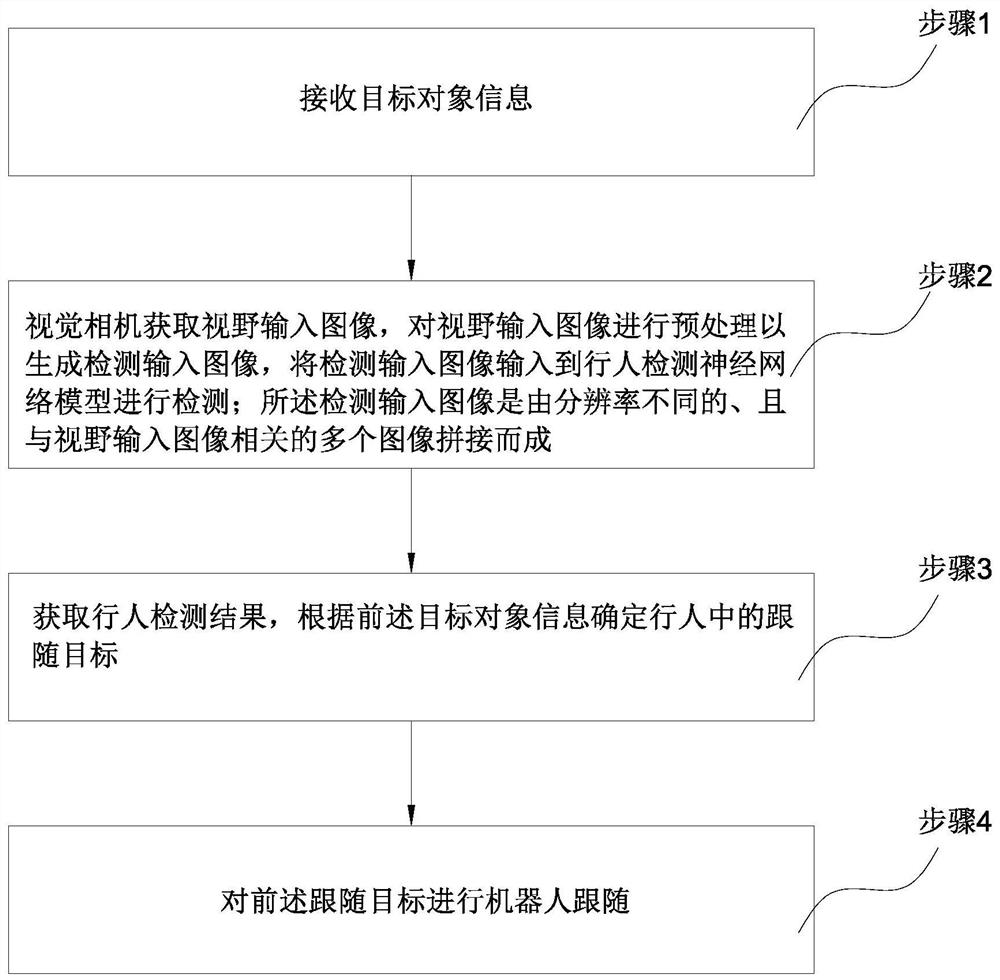
[0045] see figure 1 Shown, a kind of vision-based robot following method provided for the present invention comprises steps:
[0046] Step 1, receiving target object information.
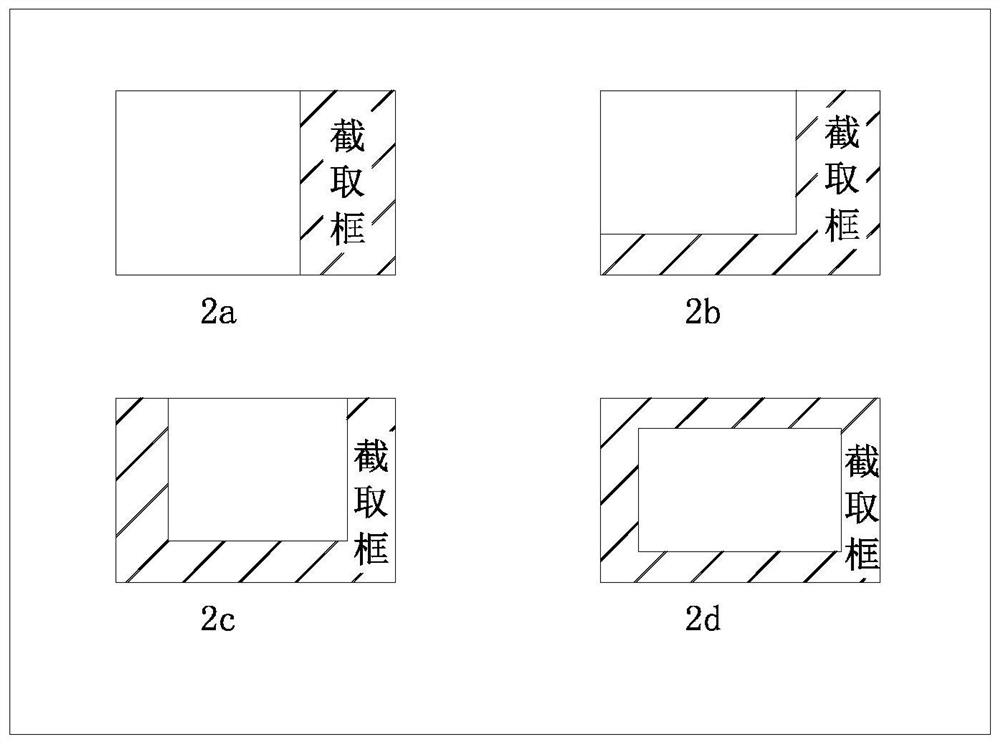
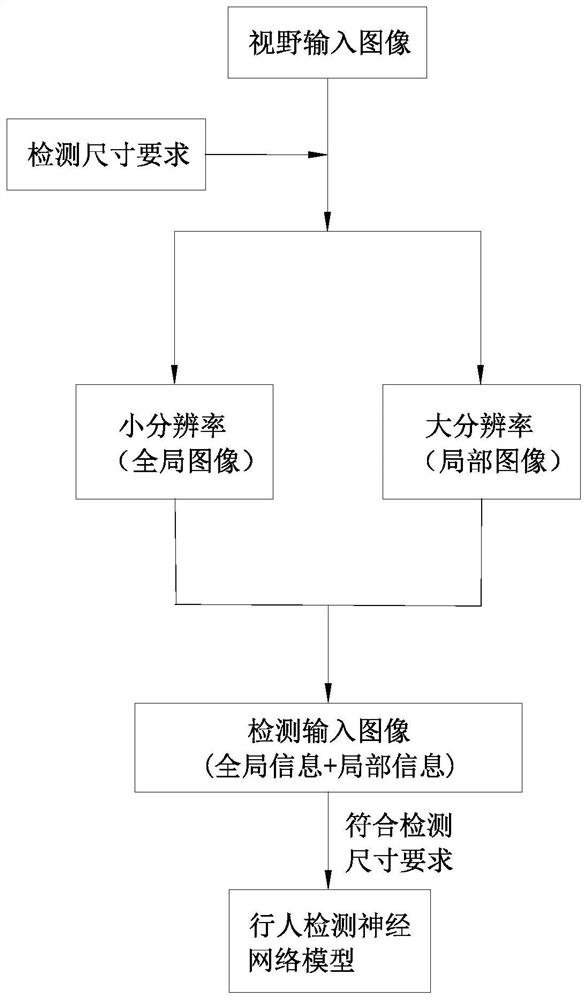
[0047] Step 2, the visual camera acquires the input image of the field of view, preprocesses the input image of the field of view to generate a detection input image, and inputs the detection input image to the pedestrian detection neural network model for detection; the detection input image is composed of different resolutions, and Stitched from multiple images related to the field of view input image.
[0048] Step 3, obtain pedestrian detection results, and determine follow-up targets among pedestrians according to the aforementioned target object information.
[0049] Step 4, the robot follows the aforementioned follow target.
[0050] In this embodiment, preferably, the target object information includes face feature information and first following distance information of the target object,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More