

Learning system, walking training system, system, method, program, and learning completion model
A walking training and learning system technology, applied in the field of learning completed models, can solve problems such as difficult settings for training staff
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0054] Hereinafter, Embodiment 1 will be described with reference to the drawings.
[0055] (system structure)
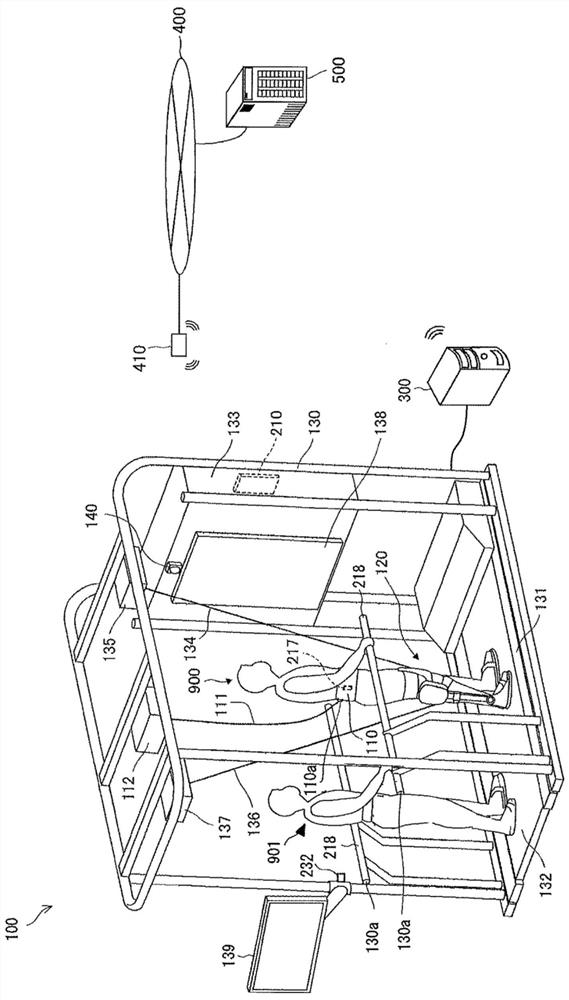
[0056] figure 1 It is an overall schematic diagram showing a configuration example of the rehabilitation support system according to the first embodiment. The rehabilitation support system (rehabilitation system) of this embodiment is mainly composed of a walking training device 100 , an external communication device 300 , and a server (server device) 500 .
[0057] Walking training device 100 is a specific example of a rehabilitation assisting device that assists a trainer (user) 900 in rehabilitation (rehabilitation exercise). The gait training device 100 is a device for a trainer 900 who is a hemiplegic patient with one leg paralyzed to perform gait training in accordance with the guidance of a training staff 901 . Here, the training worker 901 may be a therapist (physiotherapist) or a doctor, and may also be called a training instructor, a training helper, or...
Embodiment approach 2
[0196] In Embodiment 1, the actual measurement value of the walking FIM was used as the index showing the degree of recovery, but in this embodiment, the estimated value of the walking FIM is used as the index showing the degree of recovery. For example, as input data for the learned model described in Embodiment 1, an estimated value of walking FIM is used. Hereinafter, the processing of the gait training system of this embodiment will be described.
[0197] (Inference of walking FIM)
[0198] First, processing of the server 500 will be described. The server 500 generates not only the learned model described in Embodiment 1, but also a learning model that outputs an estimated value of walking FIM. Hereinafter, for clarity of description, a learning model for outputting recommended setting parameters is referred to as a first learning model or a learning model for recommended setting parameters. On the other hand, the learning model for outputting the estimated value of wal...
Embodiment approach 3
[0230] In Embodiment 3, server 500 divides trainers 900 into a plurality of groups. Furthermore, the server 500 constructs a learning model for each group. Specifically, server 500 clusters trainers based on trainer data. In addition, since the basic configuration and processing of the system of Embodiment 3 are the same as those of Embodiments 1 and 2, description thereof will be appropriately omitted. In addition, the control unit 510 generates at least one of the first learning model and the second learning model for each group.
[0231] use Figure 12 The processing method of this embodiment will be described. Figure 12 It is a flowchart for explaining the processing of the control unit 510. First, similarly to Embodiment 1, the control unit 510 acquires rehabilitation data (S21). Then, the control unit 510 groups the trainers (S22). As grouped training data, the values of the initial walking FIM and SIAS can be used. For example, trainers whose initial walking F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More