


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Synchronous AGV carrying system with collaborative active sensing and carrying method thereof
A handling system and active technology, applied in the direction of transportation and packaging, conveyors, storage devices, etc., can solve the problem of inability to realize the synchronization of the handling force, handling height and displacement, the inability to actively perceive the surrounding conditions, and the inclination of heavy objects, etc. problems, to achieve the effect of saving manpower, reducing the risk of handling, and reducing physical labor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
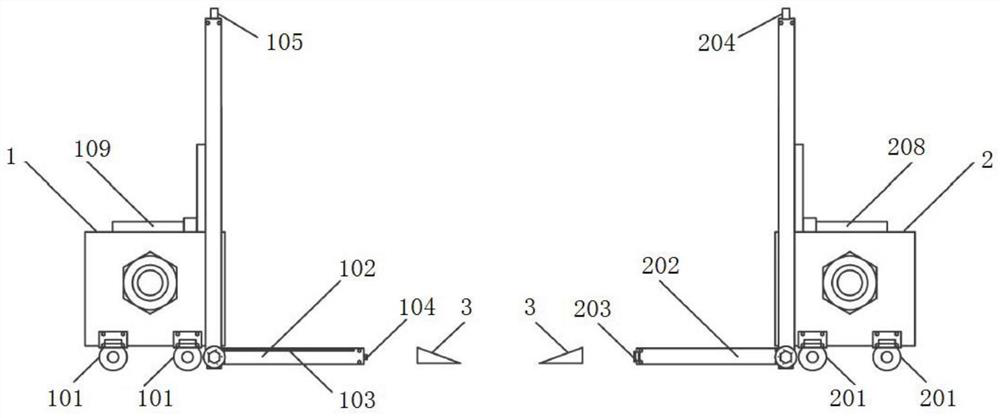
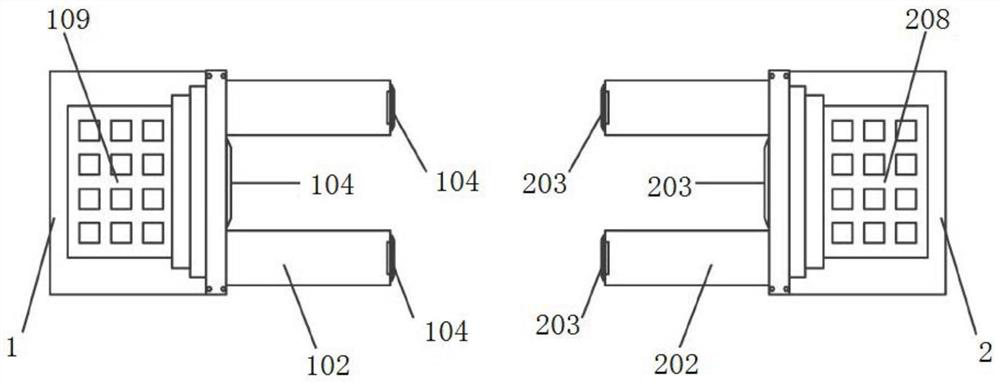
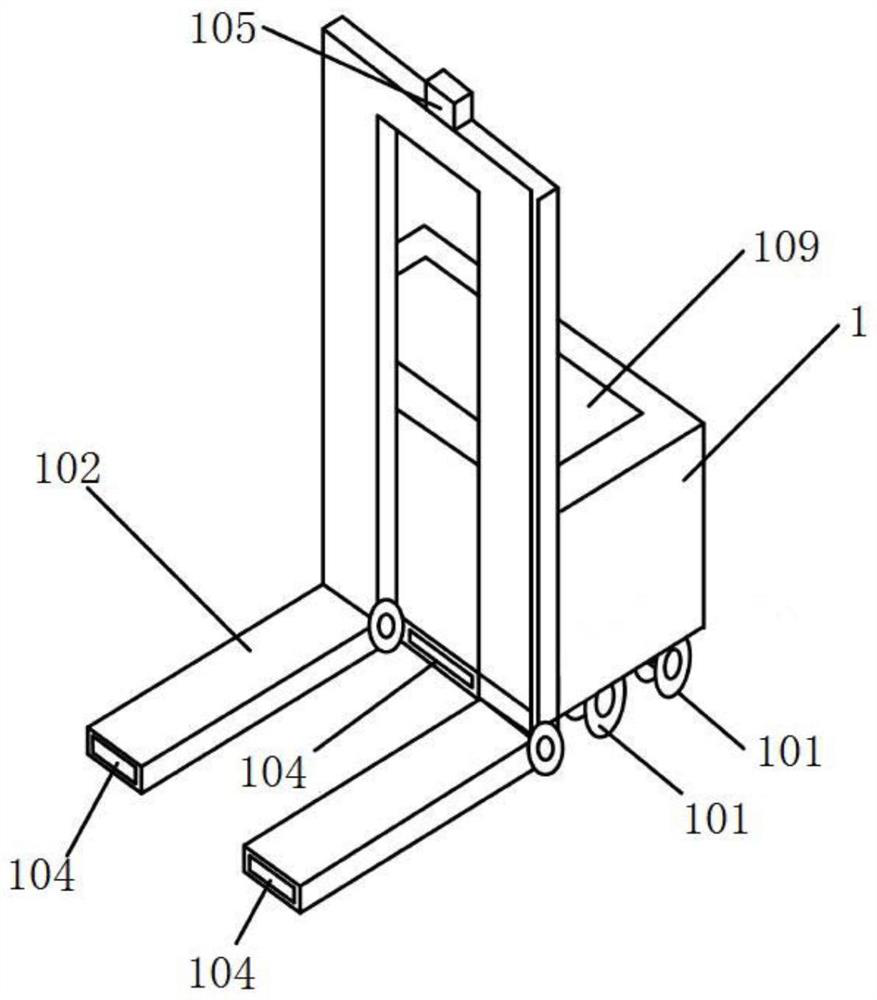
[0068] Such as Figure 1-6 As shown, the present invention discloses a synchronous AGV handling system with cooperative active perception, including the main handling AGV1, the synchronous handling AGV2 and the auxiliary slope 3, wherein:
[0069] The lower end of the main transport AGV1 is connected with some first free wheels 101 for the movement of the main transport AGV1, the front end of the main transport AGV1 is equipped with a first lifting plate 102, the first lifting plate 102 The upper end has a built-in pressure sensor 103, which is used to detect the force used by the first lifting plate to lift the heavy object. The pressure sensor 103 is recessed to prevent the pressure of the heavy object from affecting the detection of the pressure sensor 103 on the lower surface. , the front end of the main transport AGV1 is equipped with an infrared sensor emitting device 104, the upper end of the main transport AGV1 is equipped with a first active perception identification ...
Embodiment 2
[0082] Such as Figure 7 with 8 As shown, the present invention additionally discloses a handling method of a synchronous AGV handling system with cooperative active perception, using the above-mentioned synchronous AGV handling system with cooperative active perception for handling, specifically including:
[0083]The user first sets the initial settings of the main transport AGV through the first AGV setting panel 109, and then the main transport AGV1 starts to work and lift heavy objects, and the upper control system controls the first servo motor 106 to drive the first screw rod 107 and its accessories according to the initial settings. The first connection device 108 of the first vehicle pulls the first lifting plate 102. At this time, the pressure sensor 103 on the main transport AGV1 detects the force used to lift the heavy object, and the first on-board control system sends it to the upper control system through preliminary processing. The upper control system compare...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com