

Unmanned inspection robot for power distribution room
A technology for inspection robots and power distribution rooms, applied to color TV parts, TV system parts, instruments, etc., can solve problems such as single repetitive work, achieve low safety hazards, high accuracy, and save labor time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
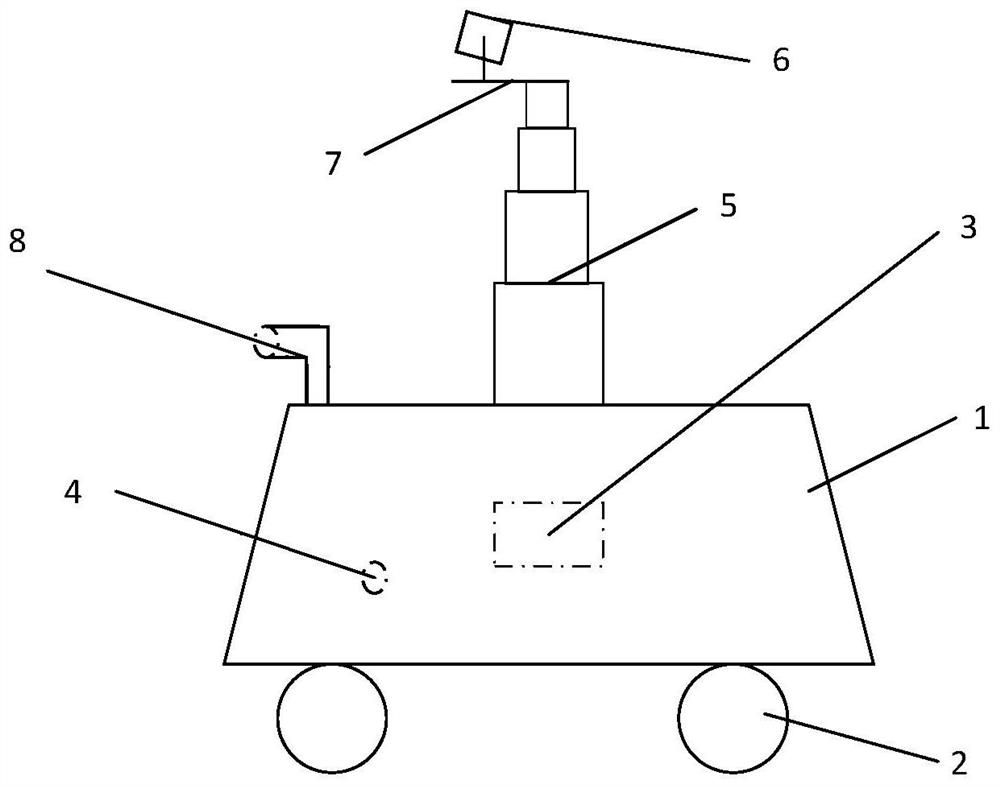
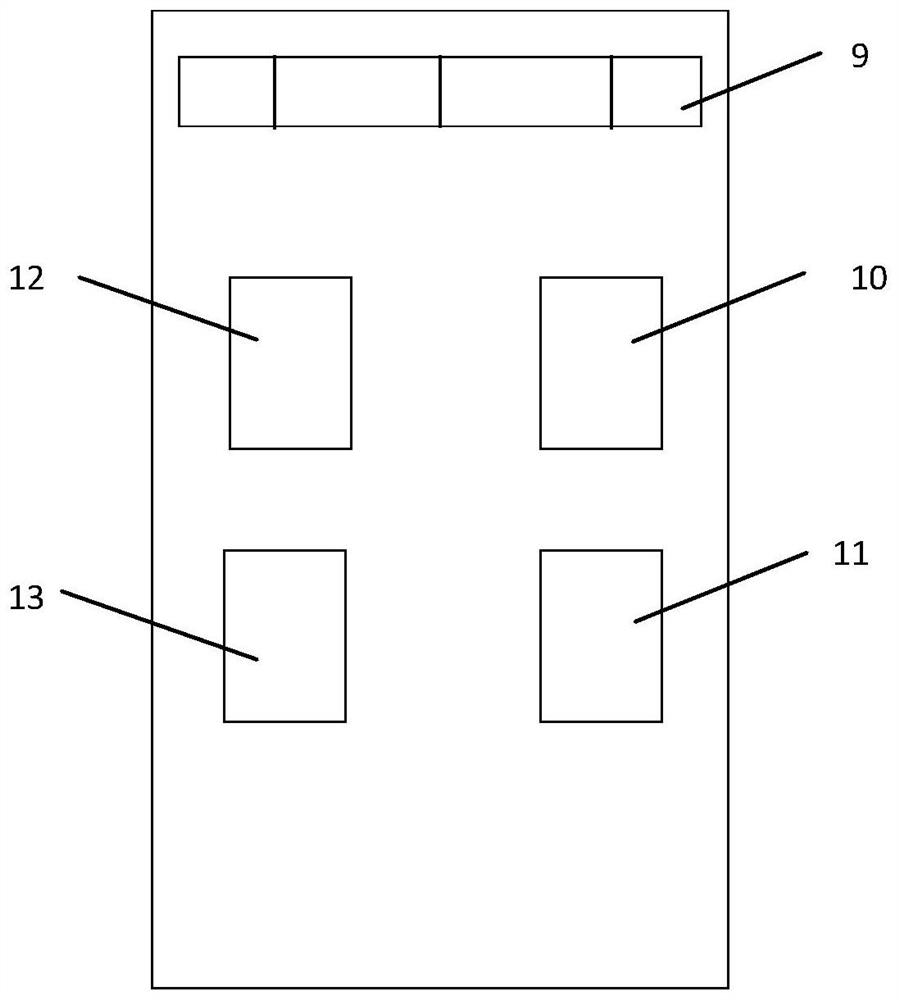
[0041] Such as figure 1 with figure 2 As shown, this embodiment provides an unmanned inspection robot for a power distribution room, including a vehicle body 1, wheels 2, a vehicle body driving mechanism and a core control panel 3. The vehicle body driving mechanism is arranged in the vehicle body 1 and is connected to the wheels 2. It is used to drive the wheel 2 to rotate, and the driving mechanism of the vehicle body is connected to the core control board 3; the unmanned inspection robot also includes a lifting platform 5 connected to the core control board 3, a camera platform 7, a camera module 6, an ultrasonic sensor 8, and a coded The DC motor of the device and the magnetic conduction sensor 9, the lifting platform 5 is connected with the camera platform 7 and the camera module 6 in turn, the lifting platform 5 is driven by a DC motor with an encoder, and the magnetic conduction sensor 9 is arranged at the bottom of the vehicle body 1;
[0042] The core control board ...
Embodiment approach
[0065] This embodiment also provides an optimal implementation mode, as follows:
[0066] An unmanned inspection robot for power distribution room. The body structure adopts core control board 3, lifting platform 5, DC motor with encoder, high-definition camera, infrared imaging, tracking module, ultrasonic module and sound detection module. The positioning steps of the unmanned inspection robot are as follows:
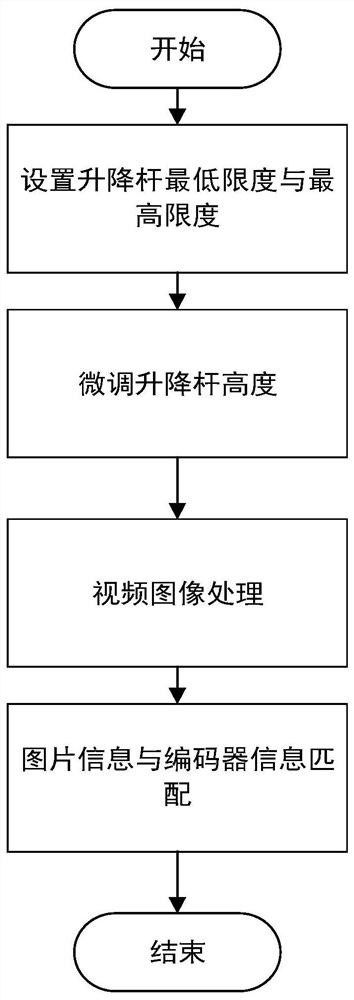
[0067] S1: Set the minimum and maximum limits of the elevating head 5;
[0068] S2: The robot moves forward and takes a camera;
[0069] S3: Decompose the captured video and take out each frame of image;
[0070] S4: Perform edge detection and binarization processing on the image to obtain the block diagram where the meter is located;
[0071] S5: Screen out the correct and appropriate block diagrams and obtain location information.
[0072] The body structure, the positioning steps and the specific implementation process are described in detail below.
[0073] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More