Script-based robot configuration method and robot
A configuration method and robot technology, applied in the field of robots, can solve problems such as development workload expansion, achieve rapid assembly, improve flexibility, and reduce design complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
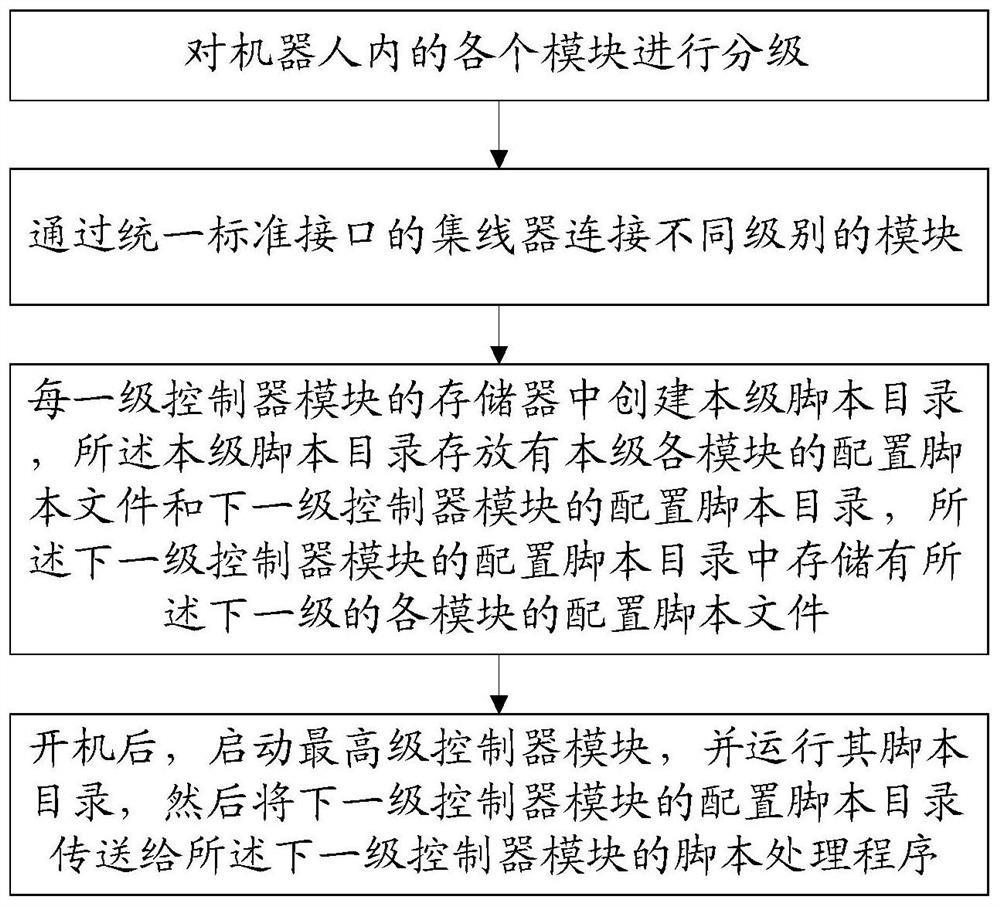
[0054] Please refer to Figure 2 to Figure 4 , this embodiment provides a script-based robot configuration method, which can not only realize the free design and rapid assembly of each module, but also improve the flexibility of development and debugging, and reduce the design complexity at the same time.
[0055] This embodiment adopts a cascaded robot based on hardware modules. Each hardware module contained in the robot is pre-graded, and modules of different levels are connected by a hub with a unified standard interface.
[0056] In the following, each module in the chassis motion device of the robot is used as a first-level module; each module in the body application device is used as a second-level module as an example. It should be noted that the classification method is not limited to this.
[0057] The robot includes a chassis motion device and a body application device. The chassis motion device is used to control and drive the movement, obstacle avoidance, positi...
Embodiment corresponding Embodiment 1
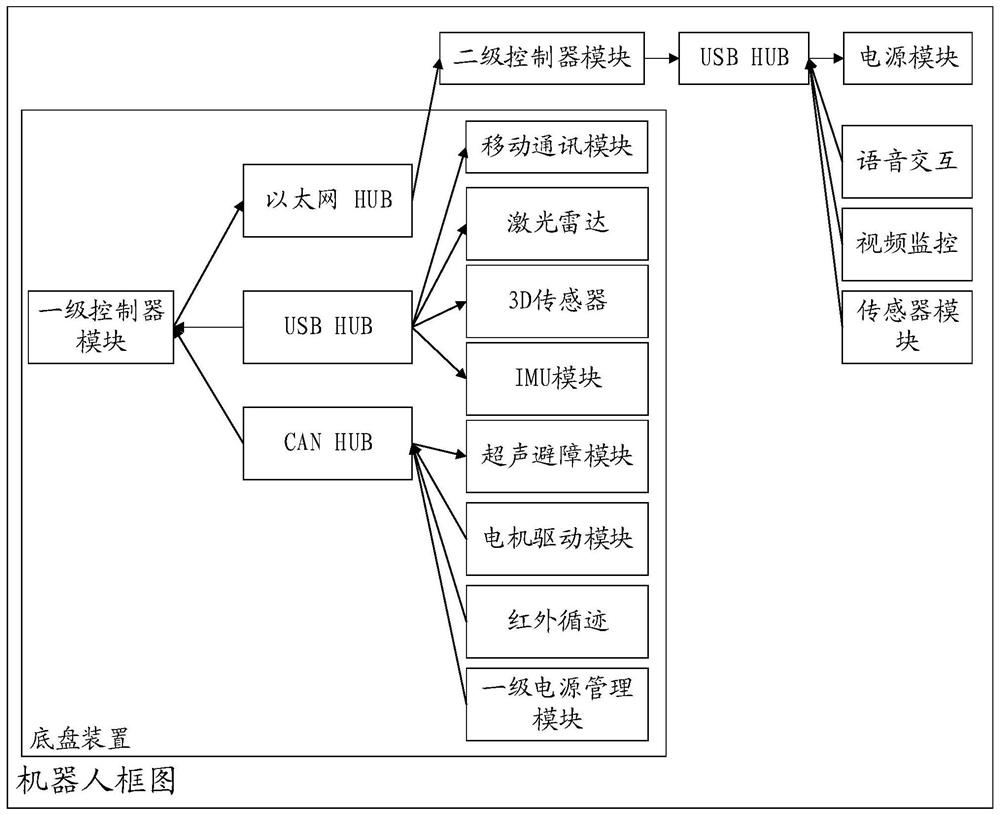
[0087] This embodiment corresponds to Embodiment 1, and provides a specific application scenario:
[0088] A mobile robot, including a robot chassis motion device and an application device, such as figure 2 As shown, the chassis motion device includes a first-level controller module (the main control module in the figure), a first-level power management module, a first-level hub module, a mobile communication module, and other functional modules. The other functional modules may include laser radar, 3D sensor, IMU module, ultrasonic obstacle avoidance module, motor drive module, infrared tracking module and other modules; the hub module includes Ethernet hub module, USB hub module, CAN hub module The laser radar module, the 3D sensor module, and the IMU module communicate with the first-level controller module through the USB HUB; the first-level power management module, ultrasonic obstacle avoidance module, motor drive module, and infrared tracking module pass through the CA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com