Sliding bearing form and position error modeling method based on SDT theory
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A sliding bearing, shape and position error technology, applied in the field of sliding bearing shape and position error modeling based on SDT theory, can solve problems such as large limitations and shape and position error, and achieve the effect of accurate representation
Active Publication Date: 2021-01-05
GUANGXI UNIVERSITY OF TECHNOLOGY
View PDF2 Cites 3 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] However, the sliding bearing rotor system model constructed based on Sommerfeld coefficients discusses the influence of shape and position errors on operating characteristics by describing the geometric shape, but it can only reveal the general law of the influence of shape and position errors on operating characteristics, and does not In-depth construction of the relationship between operating characteristics and subsequent tolerance optimization, only macroscopically describes the shape and position error of the error, which has relatively large limitations
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
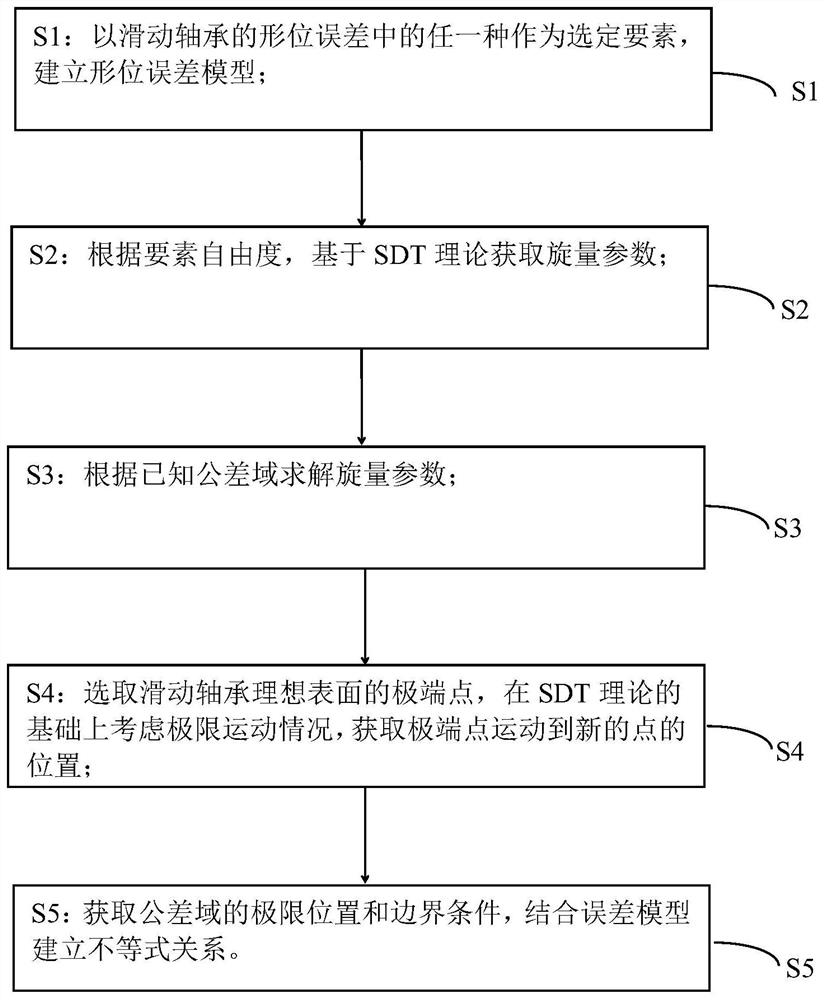
[0032] See attached figure 1 As shown, Embodiment 1 of the present invention discloses a method for modeling the shape and position error of a sliding bearing based on the SDT theory, including:
[0033] S1: Take any one of the shape and position errors of the sliding bearing as a selected element to establish a shape and position error model;
[0034] S2: According to the degree of freedom of the elements, the screw parameters are obtained based on the SDT theory;
[0035] S3: Solve the screw parameters according to the known tolerance domain;
[0036] S4: Select the extreme point of the ideal surface of the sliding bearing, consider the extreme motion situation on the basis of SDT theory, and obtain the position of the extreme point moving to a new point;
[0037] S5: According to the limit positions and boundary conditions of the known tolerance domain, combine the error model to establish inequality constraints.
[0038] Specifically, the degree of invariance (n) refers...
Embodiment 2
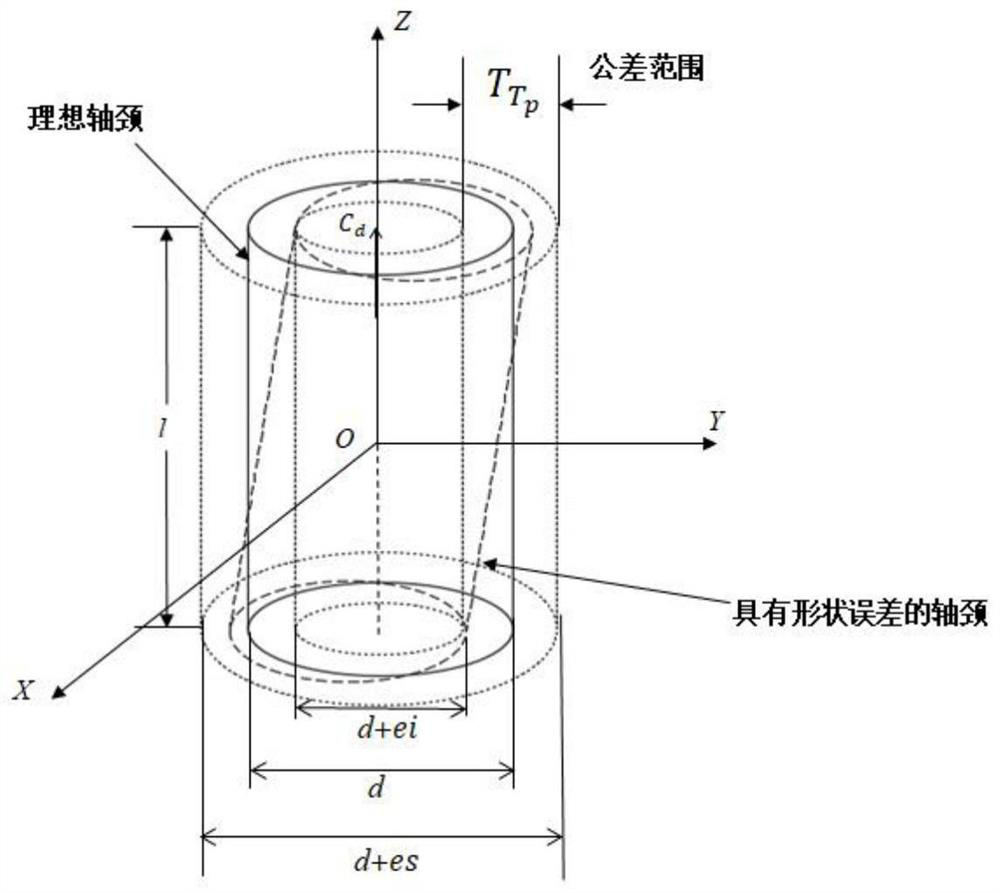
[0061] See attached image 3 As shown, this embodiment 2 takes the cylindricity of the sliding bearing as an example, according to the geometric invariance of cylindricity, the screw parameter d in the direction of constant degree is eliminated z , d x , d y , Both are variable screw parameters, so the cylindricity error model can use the formula
[0062] express,
[0063] In the formula, x, y and z are the coordinates of any point on the journal surface of the sliding bearing, r is the nominal radius of the journal of the sliding bearing, is the tolerance domain, and all shape error parameters conform to the following equations:
[0064]
[0065]
[0066]
[0067]
[0068] After converting from the Cartesian coordinate system to the cylindrical coordinate system, the cylindricity error model can be transformed into:
[0069]
[0070] In the formula,
[0071] All infinitesimal displacement spinors should be within the specified tolerance range, r(...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a sliding bearing form and position error modeling method based on an SDT theory. The method comprises the steps: S1, building a form and position error model through taking any one of form and position errors of a sliding bearing as a selected element; S2, according to the degree of freedom of the elements, obtaining a spinor parameter based on an SDT theory; S3, solving aspinor parameter according to the known tolerance domain; S4, selecting the extreme point of the ideal surface of the sliding bearing, considering the extreme motion situation on the basis of the SDTtheory, and obtaining the position of the extreme point moving to a new point; and S5, according to the limit position and the boundary condition of the known tolerance domain, establishing an inequality constraint condition in combination with the error model. According to the invention, the generalized equation derived on the basis of the SDT theory not only can represent one form and positionerror, but also can represent any form and position error on the journal.
Description
technical field [0001] The invention relates to the technical field of manufacturing error analysis, in particular to a modeling method for shape and position errors of sliding bearings based on SDT theory. Background technique [0002] At present, sliding bearing rotor systems are widely used in large-scale high-speed and heavy-load studies of manufacturing errors and their interactions. From a manufacturing point of view, the stability of sliding bearings is crucial to the design of modern bearing-rotor systems. [0003] However, the sliding bearing rotor system model constructed based on Sommerfeld coefficients discusses the influence of shape and position errors on operating characteristics by describing the geometric shape, but it can only reveal the general law of the influence of shape and position errors on operating characteristics, and does not The in-depth construction of the relationship between the operating characteristics and the subsequent tolerance optimizat...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More