

Mobile robot autonomous charging method based on ArUco code guidance
A mobile robot and autonomous charging technology, applied in the field of mobile robots, can solve the problems of small transmission distance, low emission intensity, large computing resources, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
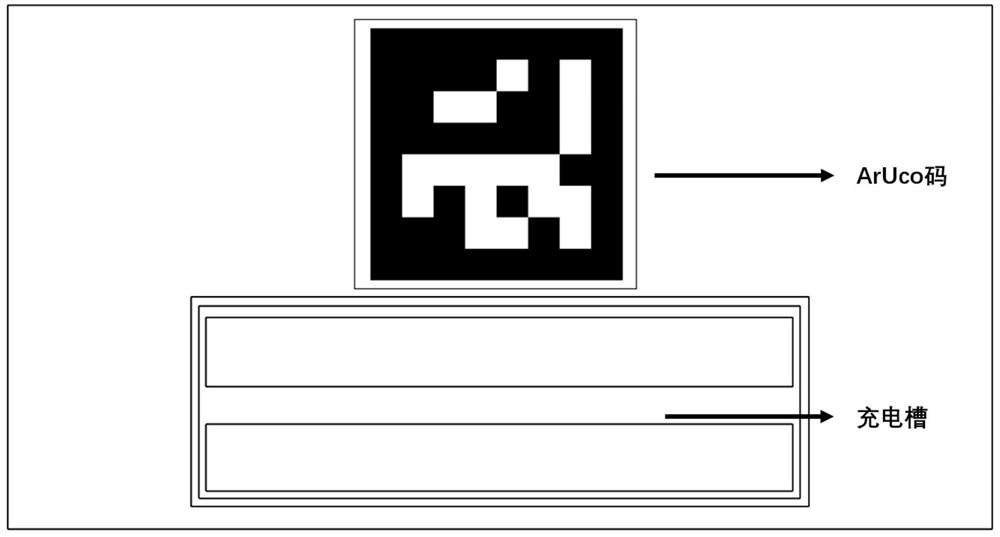
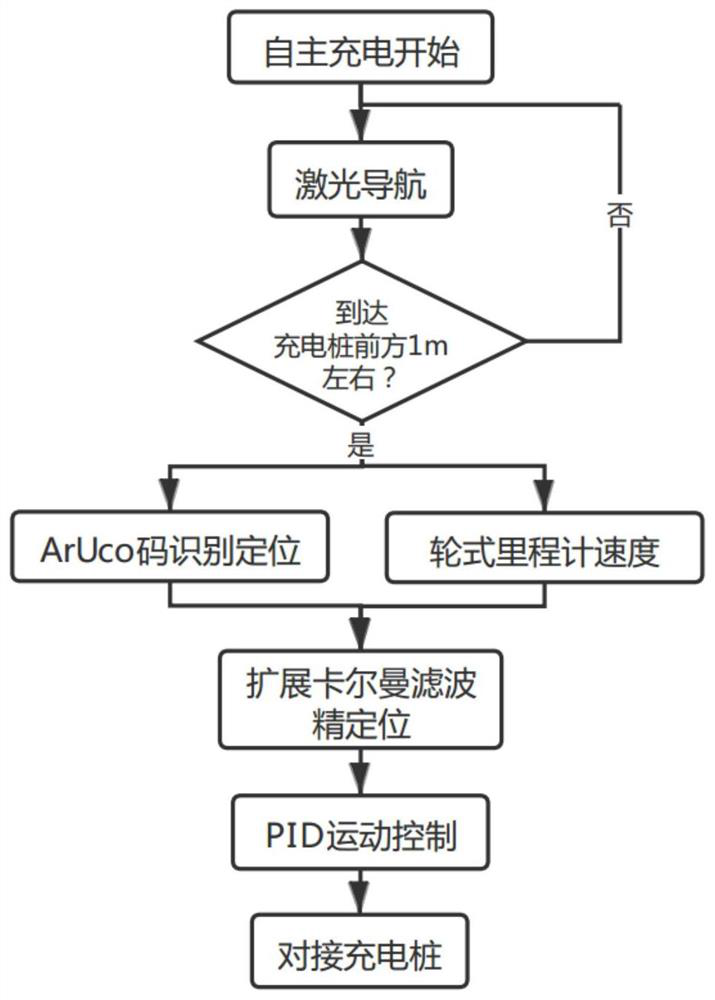
[0073] The invention relates to an autonomous charging method for a mobile robot guided by an ArUco code. The main principle of the method is: when the mobile robot detects that the power is lower than a certain threshold, or receives a charging command sent by a human, the mobile robot will autonomously return to the docking charging Pile, self-charging. Before using this method for autonomous charging, the mobile robot and the environment scene should have completed the following two preparation stages:
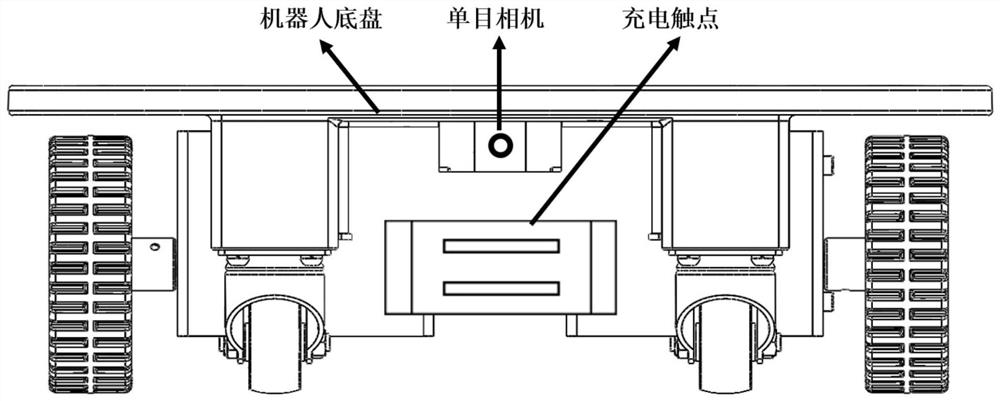
[0074] 1. Install a charging contact at the bottom position directly behind the mobile robot, which is connected to the onboard battery and the control box of the mobile robot. After the contact touches the charging slot of the charging pile, it can supply power to the robot at the same time , Charge the on-board battery. Just above the charging contacts, a monocular camera is installed, which is connected to the control box through a USB interface to provide real-time ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More