

High-precision multi-rotor aircraft cooperative positioning method and system
A technology of co-location and rotorcraft, applied in satellite radio beacon positioning system, radio wave measurement system, navigation through speed/acceleration measurement, etc. Positioning requirements and other issues to achieve the effect of eliminating sensor random errors, reducing costs, significant time advantages and accuracy advantages
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
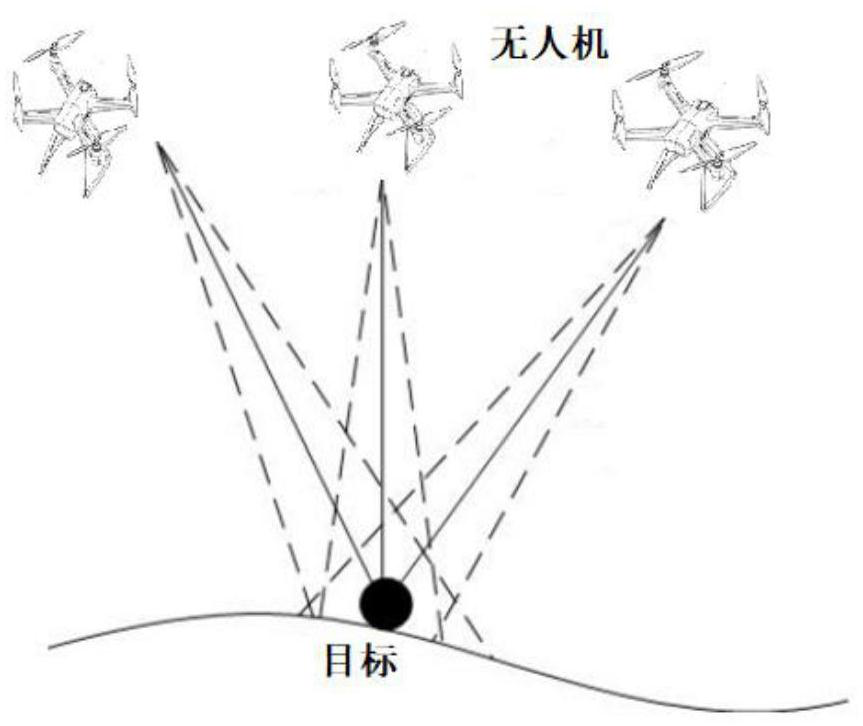
[0110] Simulate the multi-UAV positioning target, set the number of UAVs to 3, and when the UAV is 3000m away from the target, the camera of the photoelectric pod detects the target, locks the target, and the laser rangefinder starts For target distance measurement, the UAV itself collects data at a flight speed of 10m / s, and records the data of each sensor (including integrated navigation module, photoelectric pod, and laser range finder).
[0111] The noise of each sensor obeys the Gaussian distribution, which is Gaussian white noise with a mean value of zero. The error level of each sensor parameter is shown in Table 1:
[0112] Table 1
[0113]
[0114]
[0115] In order to speed up the convergence of the target position estimation error curve, after the UAV stabilizes the target, it also maneuvers itself to obtain the measurement value of the target when the aircraft is in different relative positions. Assuming that the speed of the three drones is 10m / s, the flyin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More