Multi-unmanned-aerial-vehicle intelligent cooperative defense penetration confrontation method
A multi-UAV and UAV technology, applied in the field of aircraft, can solve the problems of lack of mobile air defense force model, insufficient consideration of UAV penetration tasks, etc., to balance individual benefits, improve robustness, and ensure avoidance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0033] According to a preferred embodiment of the present invention, the current observation state of the UAV includes the position and velocity vector of the UAV itself, the relative position of the detected hostile UAV, and the relative position of the detected obstacle.
[0034] In a further preferred embodiment, the position of the drone itself is obtained by a GPS positioning system;
[0035] The velocity vector of the UAV itself is obtained by the inertial measurement unit and the magnetometer;
[0036] The relative position of the hostile UAV is obtained by the photoelectric pod;
[0037] The relative position of obstacles is obtained by ultrasonic radar.
[0038] In a further preferred embodiment, the actions output by the UAV include throttle commands, longitudinal overload commands and roll angle commands of the UAV.
[0039] In the present invention, the simulation environment can obtain the observation state, action behavior, reward and successor observation stat...
experiment example
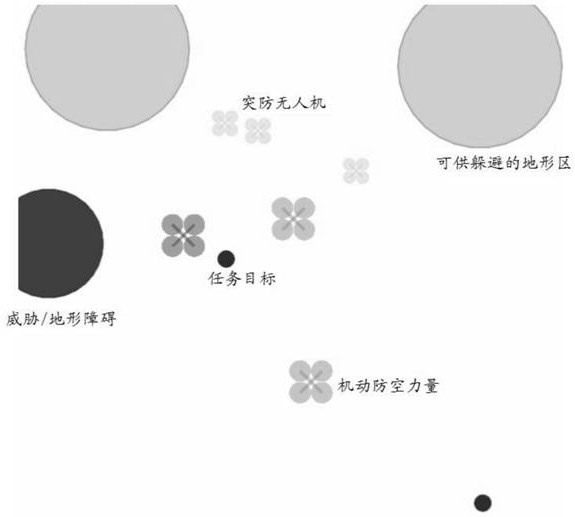
[0115] Simulate multi-UAV cooperative penetration scenarios, such as image 3 As shown, the mission area is a square area of 200m×200m, the black area is the threat / terrain obstacle, the green area is the terrain area that can be avoided, and the two blue dots represent the task target of multi-UAV coordinated penetration. The 3 red drones are the mobile air defense force in the mission area, and the 3 green drones represent the multi-drone penetration.
[0116] Among them, the parameters of each part of the simulation scene are shown in Table 1:
[0117] Table 1
[0118]
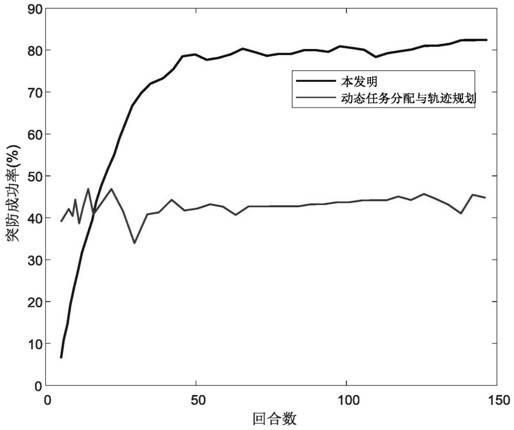
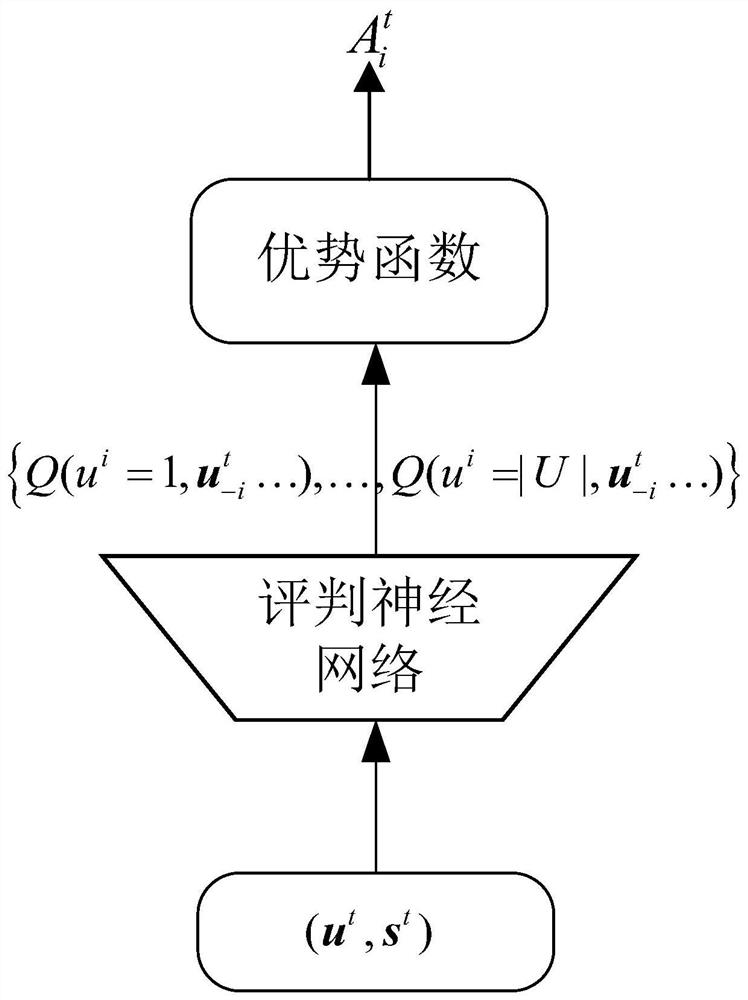
[0119] Wherein, the penetration unmanned aerial vehicle (green unmanned aerial vehicle) adopts the multi-unmanned aerial vehicle cooperative penetration method based on the counterfactual baseline evaluation-execution algorithm of the present invention to make a decision (such as figure 1 and 2 shown), whose reward function is based on the sum of the distances to the red drone and the shortest dista...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



