

Joint space continuous point track transition method and device
A technology of joint space and point trajectory, which is applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of high time cost and energy consumption cost, and achieve the effect of reducing time cost, continuous speed, and reducing energy cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
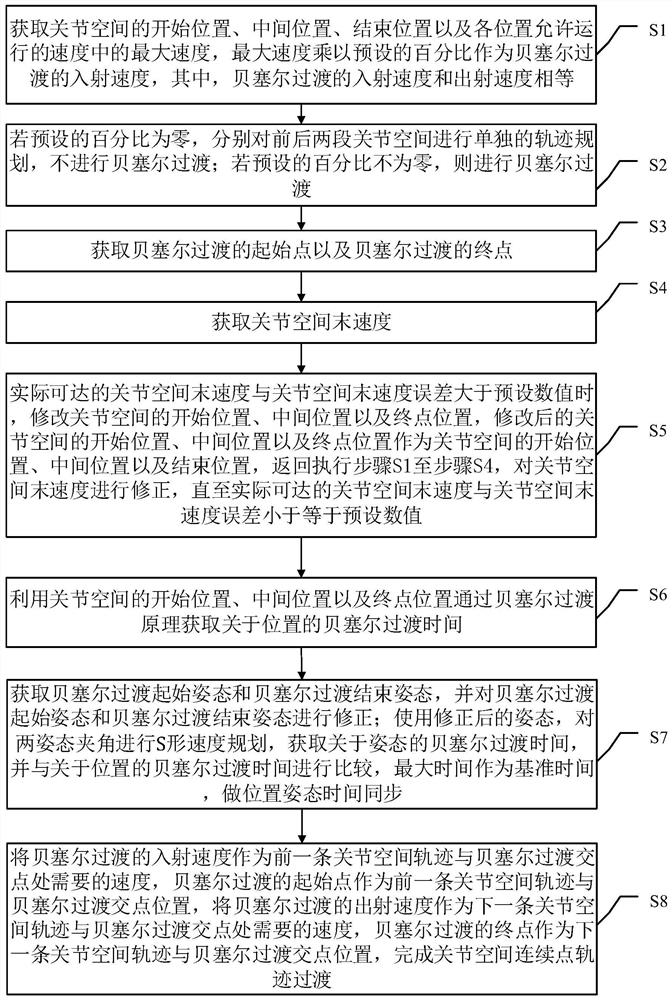
[0051] like figure 1 and figure 2 As shown, a joint space continuous point trajectory transition method, the method includes:
[0052]Step S1: Obtain the maximum velocity of the start position, middle position, and end position of the joint space, and multiply the maximum velocity by a preset percentage as the incoming velocity and outgoing velocity of the Bezier transition, where the incoming velocity and outgoing velocity of the Bezier transition equal speed;
[0053] Step S2: If the preset percentage is zero, perform separate trajectory planning for the front and rear joint spaces without Bezier transition; if the preset percentage is not zero, perform Bezier transition; the specific process is : If the preset percentage is not zero, map the start position q1, middle position q2 and end position q3 of the joint space to the Cartesian space through the mapping relationship to obtain the start position Q1, middle position Q2 and end position Q3 of the Cartesian space, Com...
Embodiment 2
[0075] Corresponding to Embodiment 1, Embodiment 2 of the present invention also provides a joint space continuous point trajectory transition device, which includes:
[0076] The first acquisition module is used to acquire the maximum velocity of the start position, the middle position and the end position of the joint space, and the maximum velocity is multiplied by the preset percentage as the incident velocity and the exit velocity of the Bezier transition, wherein, the Bezier transition The incoming and outgoing velocities are equal;
[0077] The judging module is used to perform separate trajectory planning for the front and rear joint spaces respectively without Bessel transition if the preset percentage is zero; if the preset percentage is not zero, perform Bezier transition;
[0078] The second obtaining module is used to obtain the starting point of the Bezier transition and the end point of the Bezier transition;
[0079] The third obtaining module is used to obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More