

Mechanical arm machining track correction method based on three-dimensional vision
A processing trajectory, three-dimensional vision technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve problems affecting product processing quality, time-consuming and labor-intensive, economic losses, etc., to reduce the amount of teaching, improve quality, and improve The effect of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
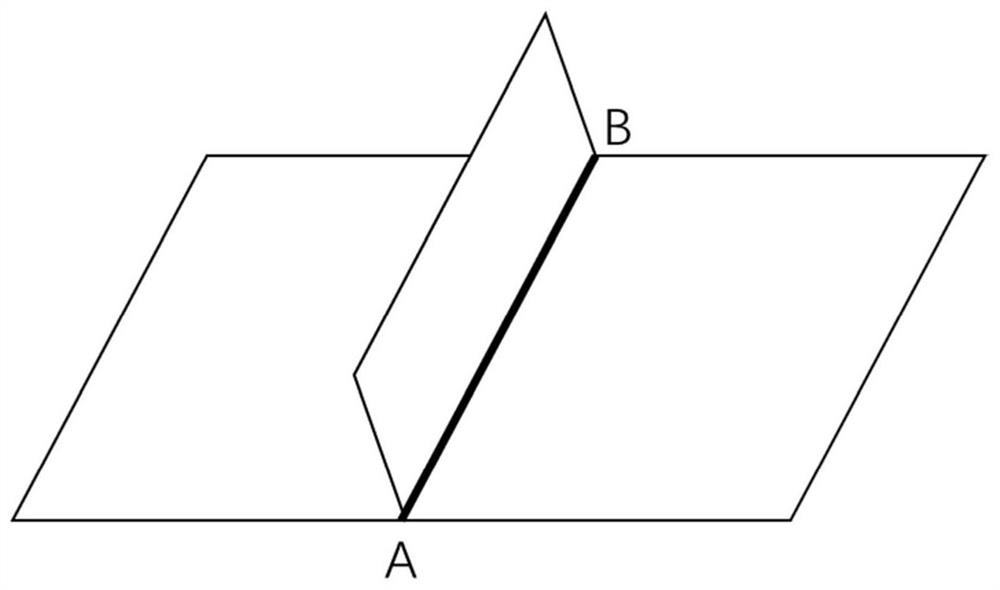
[0044] In this embodiment, the workpiece to be welded with a straight line fillet weld is used for illustration, and its schematic diagram is as follows figure 1 As shown, the red line AB marked in the figure is the weld:
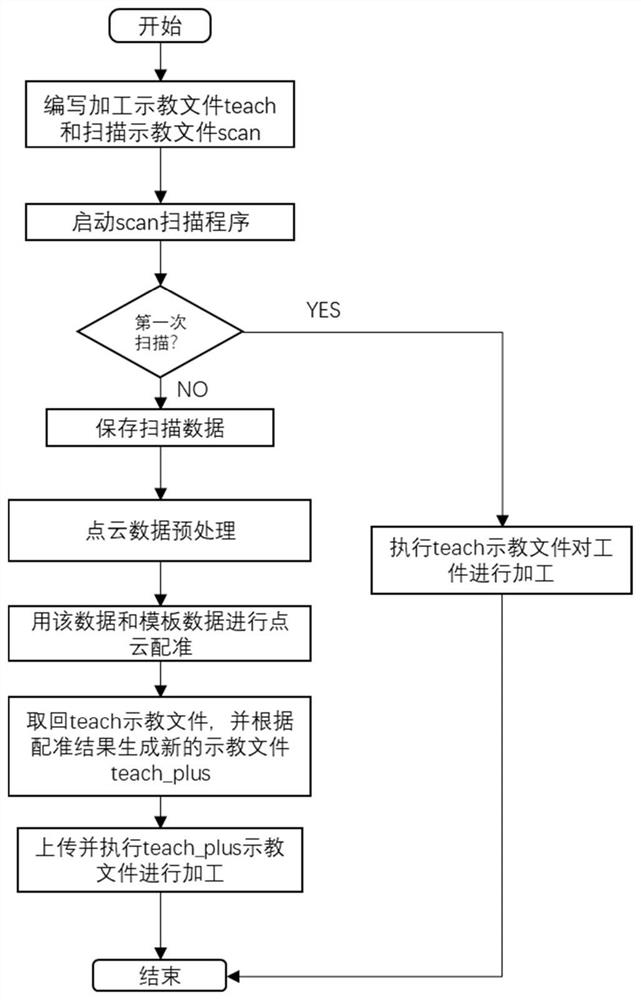
[0045] like figure 2 As shown, a method for correcting the machining trajectory of a manipulator based on three-dimensional vision, the method includes the following steps:
[0046] (a) Through the teaching pendant, the teaching program teach of robot workpiece processing and the teaching program scan of scanning are written point-to-point and saved (the name of the teaching program can be modified according to the needs of the user). The teaching program teach and scan are written by the operator. The teaching point of the processing trajectory is saved in the teach teaching file, and the operator writes the teaching program according to the processing trajectory of the workpiece to be processed; the scan teaching program scan needs to scan the workpiece...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More