

An external fixation device, system and method for coordinate calibration
A technology of coordinate calibration and calibration device, which is applied in the field of medical equipment, can solve the problems of poor reset accuracy, easy increase of infection probability, joint adhesion, etc., and achieve the effect of improving accuracy and saving operation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
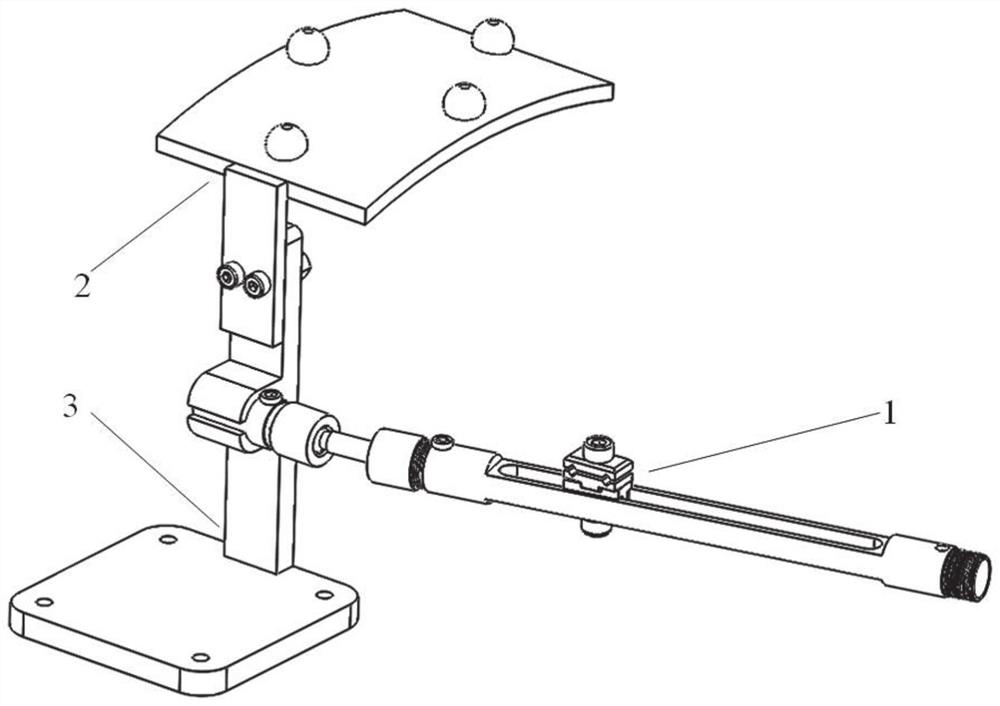
[0034] Such as figure 1 As shown, this embodiment provides an external fixation device for coordinate calibration, which can be applied to bone external fixation devices with coordinate calibration functions in orthopedic robotic surgery. The main purpose of this device for coordinate calibration is to unify different coordinate systems. In this embodiment, taking bone fixation as an example, it specifically includes: a clamping device 1, a calibration device 2 and a bracket 3;
[0035] Described clamping device 1 comprises chute bar 102 and clamper, and one end of described chute bar 102 connects bracket 3 through first fixture, and clamper is installed in the groove of chute bar 102;
[0036] The calibration device 2 includes a calibration bracket 201, one end of the calibration bracket 201 is connected to the bracket 3 through a first connector, and a calibration ball 202 is installed on the calibration bracket 201, and the calibration ball 202 is provided with a calibratio...
Embodiment 2
[0052] This embodiment provides an external fixation system for coordinate calibration, including: the external fixation device described in Embodiment 1 and a processor;
[0053] The external fixation device is used to place the clamping object in the clamping device, insert the calibration pin into the calibration hole of the calibration ball, and obtain the coordinates of the center of the sphere under the reference coordinate system;
[0054] The processor is used to model the calibration sphere as a virtual sphere according to the obtained coordinates of the center of the sphere, and match the coordinates of the center of the sphere in the reference coordinate system to the virtual sphere, and align the virtual coordinate system of the virtual sphere with the reference coordinate system, Perform fixed path planning in the virtual coordinate system, and execute the fixed path in the reference coordinate system.
[0055] It should be understood that in this embodiment, the ...
Embodiment 3
[0058] This embodiment provides an external fixation method for coordinate calibration, including:
[0059] (1) Place the gripping object in the gripper of the gripping device;
[0060] In this embodiment, taking the reduction and fixation of fractured bones as an example, put the bone needle into the V-shaped groove of the holder of the holding device, and fix the holder so that the relative positions of the distal and proximal ends of the bone are fixed, as shown in Figure 5 shown;
[0061] (2) CT scanning is used to carry out three-dimensional panoramic modeling of the external fixation device with clamped objects;
[0062] In this embodiment, CT scanning is used to carry out three-dimensional panoramic modeling of the external fixation device and bones, and to perform segmentation and solid modeling of the structures necessary for the reduction and fixation of robot fractures;
[0063] (3) Fix the whole device on the workbench, insert the calibration needle into the cal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More