

Vertical lower limb rehabilitation training robot
A rehabilitation training and robot technology, applied in the field of rehabilitation medicine, can solve the problems of patients' fear, high technique requirements, and high work intensity, so as to improve the effect of rehabilitation medicine, improve the robot structure, and ensure the strength and accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
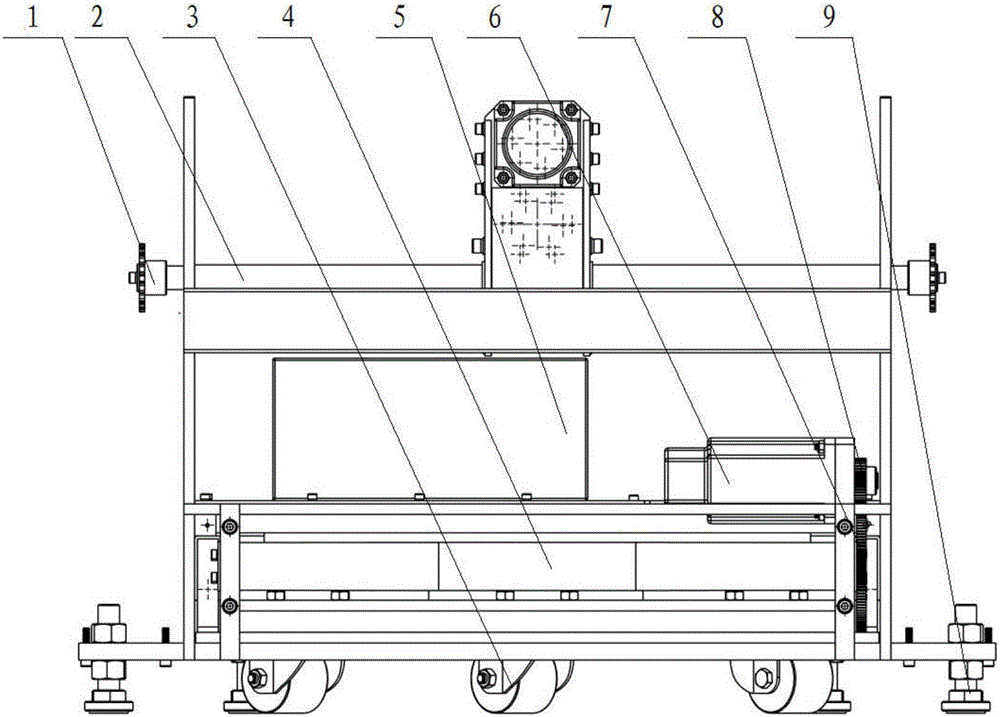
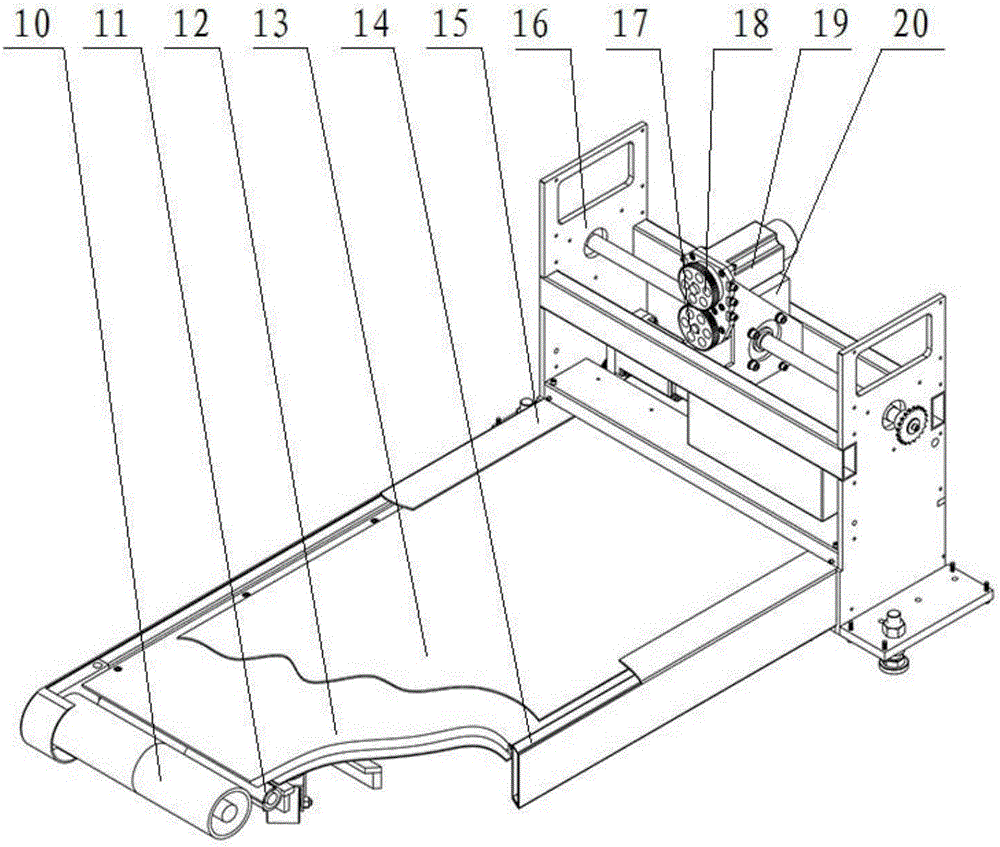
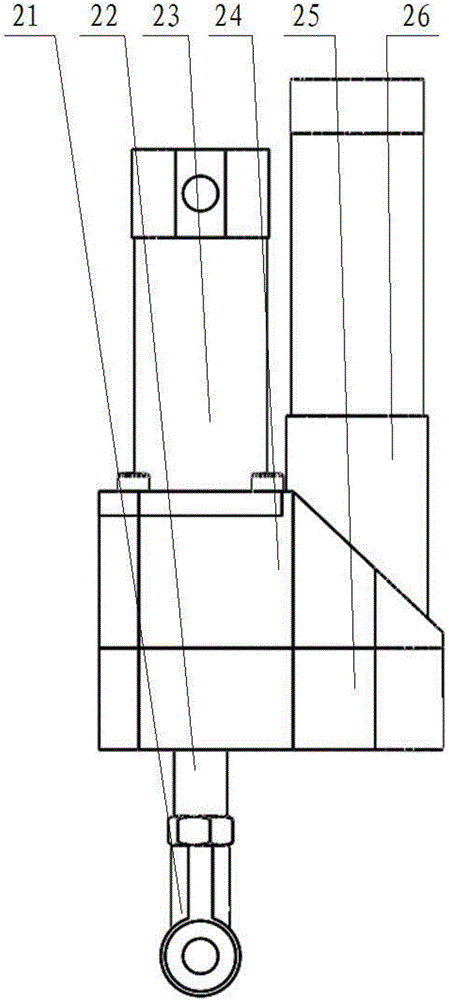
[0043] like figure 1 , figure 2 Shown is a schematic diagram of the structure of a vertical rehabilitation training robot foot movable plate, including a lifting drive sprocket 1; a lifting drive shaft 2; a universal wheel 3; a driving roller 4; a power supply 5; a treadmill motor 6; Driven gear 7; treadmill drive driving gear 8; support seat 9; driven roller 10; tension roller 11; running board 12; movable running belt 13; installation frame 14; treadmill shell 15; Lifting drive driven gear 17; Lifting drive driving gear 18; Lifting motor 19; Worm gear reducer 20.
[0044] Universal wheels 3 are fixed on the installation frame 14 to facilitate the movement of the vertical lower limb rehabilitation training robot. At the same time, support bases 9 are installed. By adjusting the position of support bases 9 downwards, the universal wheels 3 can lea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More