

Multi-sensor multi-target space-time deviation calibration and fusion method
A multi-sensor, fusion method technology, applied in the direction of instruments, radio wave reflection/re-radiation, utilization of re-radiation, etc., can solve the problem of not performing deviation compensation and fusion at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
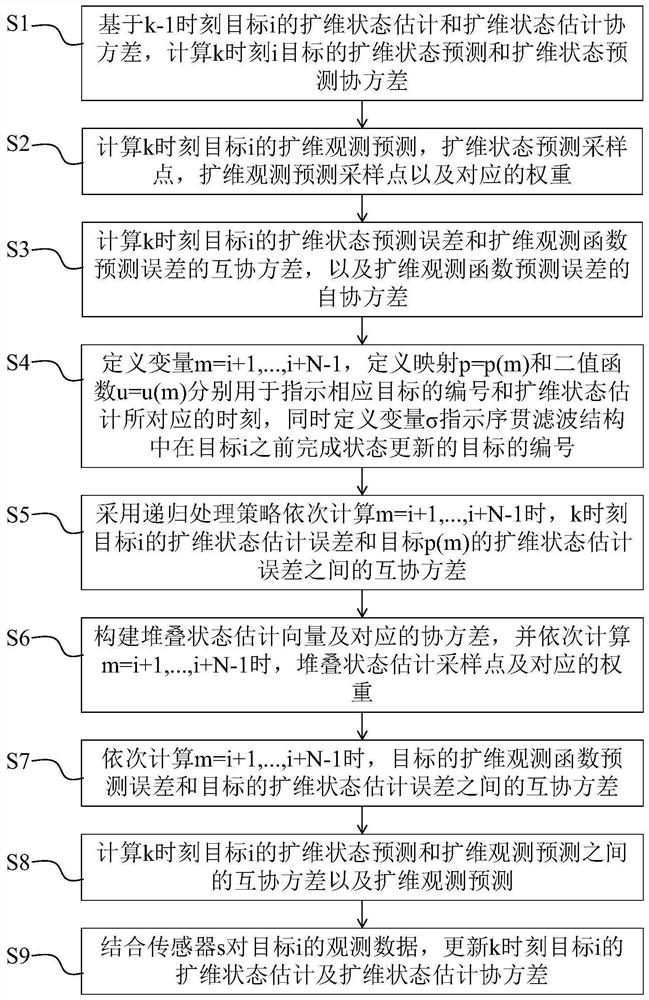
[0102] The embodiment of the present invention provides a multi-sensor multi-target space-time deviation calibration and fusion method. The present invention considers the scene where S sensors track N targets in the area. The sampling periods of the multi-sensors are different, and the sensors are provided in the polar coordinate system Dist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More