

Multi-unmanned aerial vehicle cooperative path planning method
A multi-UAV and path planning technology, applied in the field of UAVs, can solve the problem of not considering the overall benefits of UAV swarms, and achieve the effect of ensuring superiority, ensuring safety and efficiency, and accelerating convergence speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
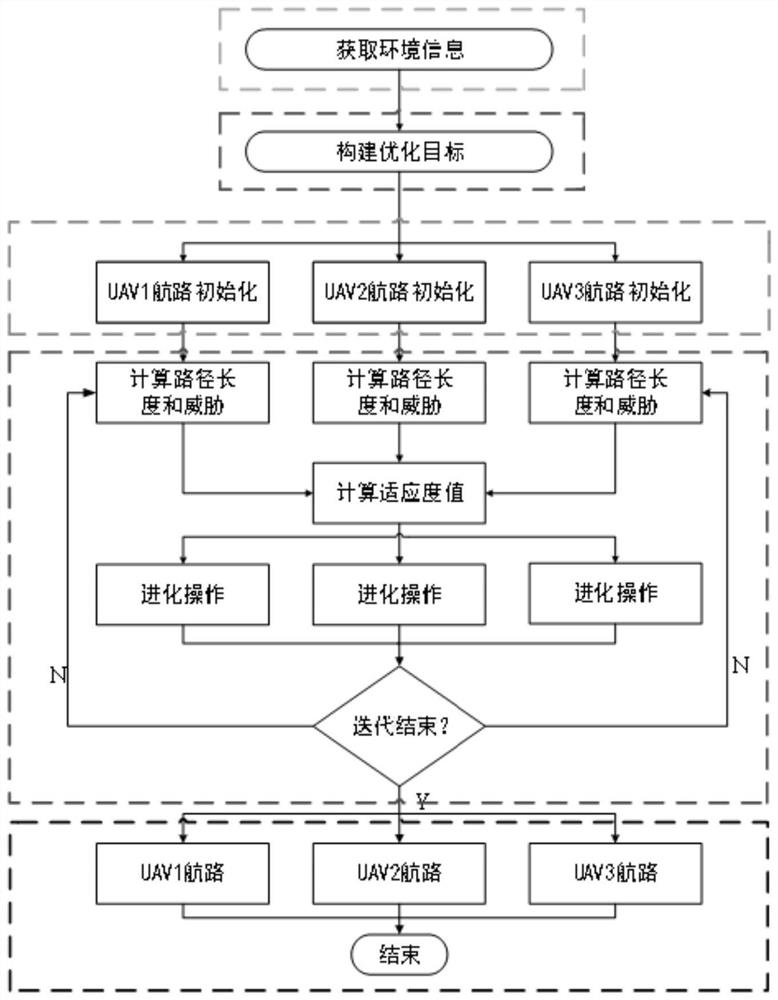
[0028] Please refer to figure 1 , the present invention provides a multi-UAV collaborative path planning method, comprising the following steps:
[0029] S1. The UAV swarm acquires the starting point position, obstacle point and existing radar coordinates in the map environment, and establishes a two-dimensional grid map of the combat environment;
[0030] The path points are expressed in the form of coordinates in a two-dimensional grid map, and the flight environment of the UAV is described as:
[0031] {(x,y)|x min ≤x≤x max ,y min ≤y≤y max};x min 、x max 、y min and y max represented as the boundary of the drone flight;
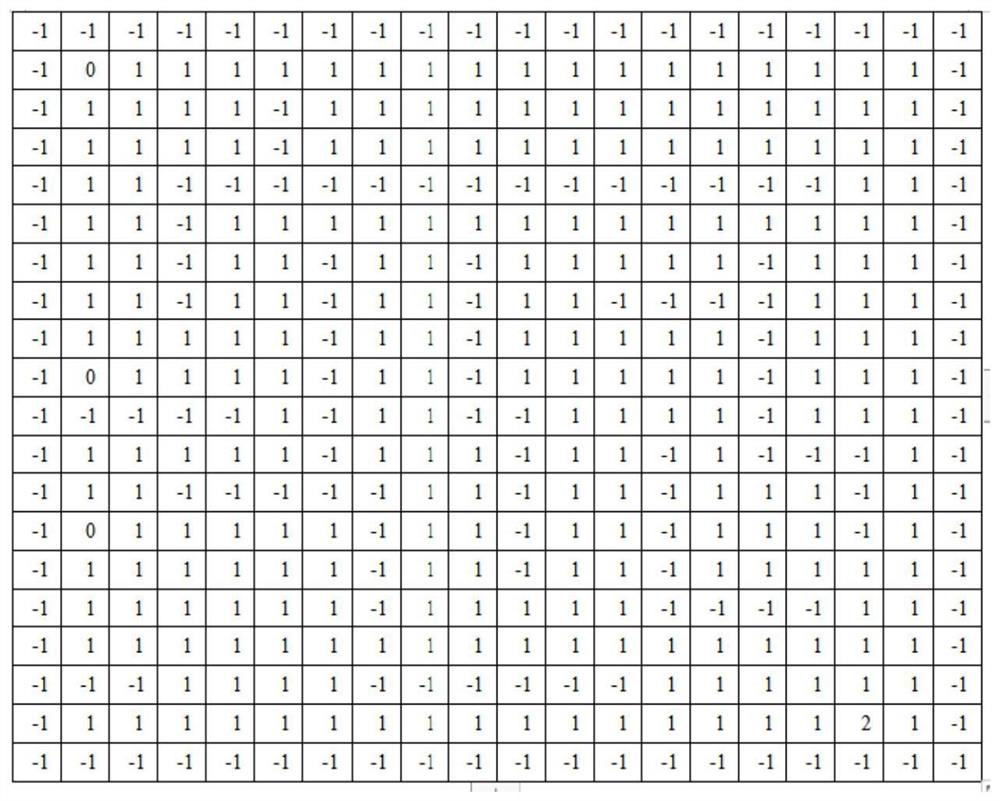
[0032] Such as figure 2 As shown, the environment is divided into 20*20 squares with the same area, and each square carri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More