Unmanned aerial vehicle autonomous landing method and model training method
A technology of unmanned aerial vehicles and network models, applied in neural learning methods, biological neural network models, computer components, etc., can solve problems such as GPS signal influence, accidents, low safety and reliability of unmanned aerial vehicles, etc., to achieve The effect of improving reliability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] UAVs or their equipment are often expensive to manufacture. If an accident occurs during the flight and landing of the UAV, it will not only seriously damage the UAV or its equipment, but also cause unpredictable damage to ground facilities or people. . Therefore, the safety and reliability of the UAV landing process are particularly important.
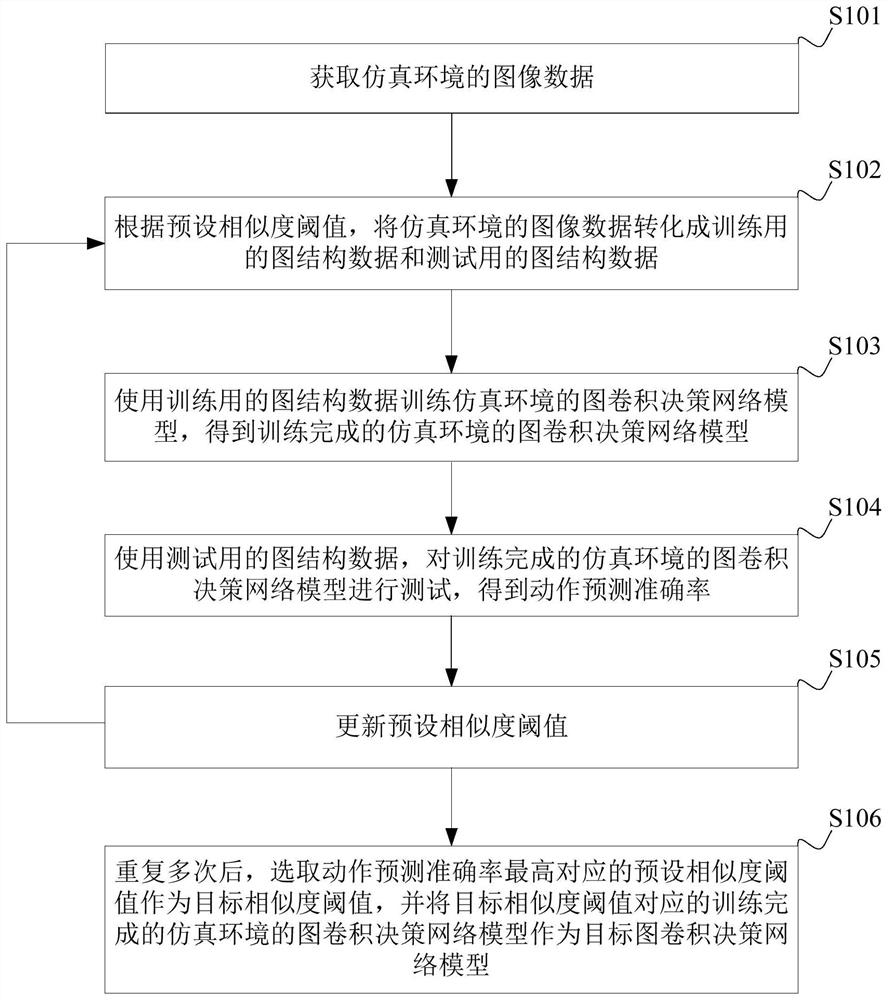
[0065] An embodiment of the present application provides an autonomous landing solution for a drone, so as to improve the safety and reliability during the landing process of the drone. In the following, the model training phase and the application phase will be respectively introduced and explained for the UAV autonomous landing solution provided by the embodiment of the present application. In the following description, specific details such as specific system structures and technologies are presented for the purpose of illustration rather than limitation, so as to thoroughly understand the embodiments of the present applica...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap