

Multi-clamping-jaw automatic switching system for mechanical arm
An automatic switching, mechanical arm technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problem of inability to automatically switch multiple grippers, saving time and improving work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can devise other obvious variations.
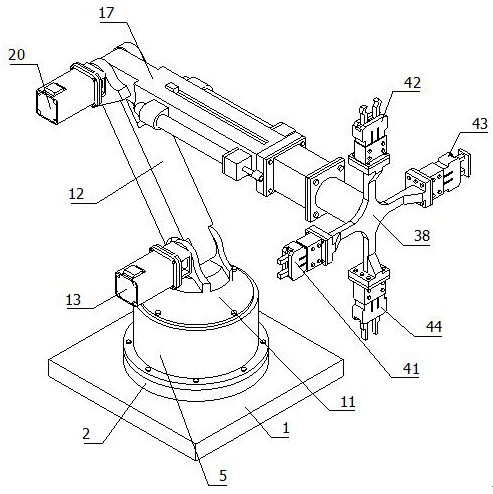
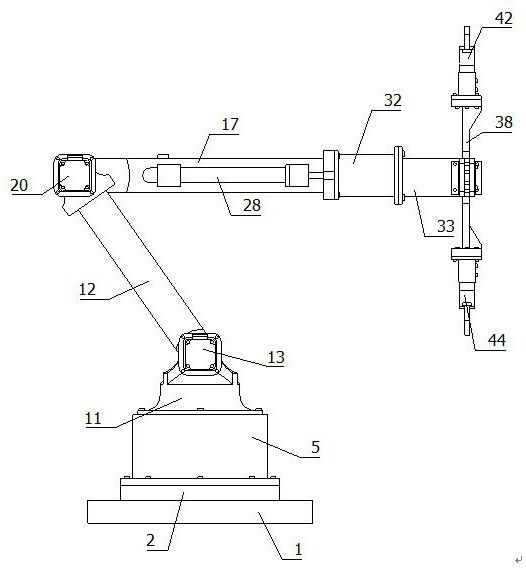
[0073] refer to Figure 1 to Figure 10 As shown, a multi-gripper automatic switching system for a robotic arm, including:
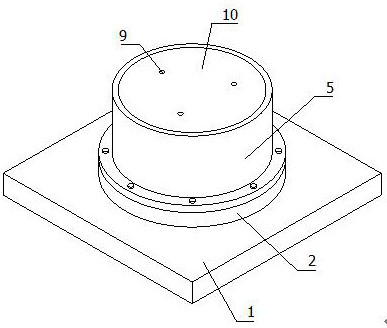
[0074] base1;
[0075] The direction adjustment component is used to adjust the grasping reverse, and the direction adjustment component is arranged on the top of the base 1;
[0076] The first-level angle adjustment component is used to initially adjust the grabbing angle, and the first-level angle adjustment component is arranged on the top of the direction adjustment component;
[0077] The second-level angle adjustment component is used to further adjust the grabbing angle, and the second-level angle adjustment component is arranged on the first-level angle adjustment component; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More