

Method and system for recovering monocular SLAM scale through detection and calibration
A technique for detecting algorithms and scales
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
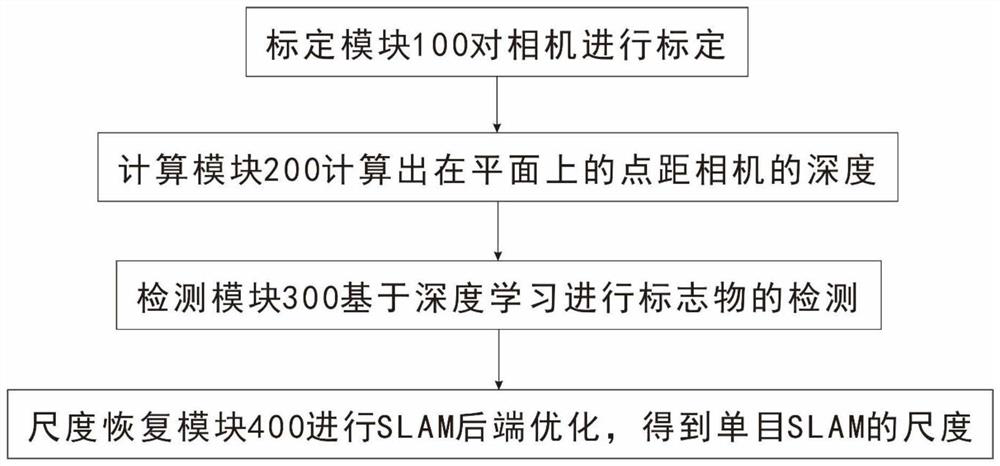
[0034] refer to figure 1 The schematic diagram is a method for recovering the monocular SLAM scale through detection and calibration proposed in this embodiment. In order to solve the problems of complex monocular SLAM scale recovery methods in the prior art and large amount of operation and calculation, this embodiment It is proposed to restore the monocular SLAM scale through the method of calibration and detection, which reduces the amount of calculation and complexity, and makes the monocular SLAM scale recovery easier to achieve.
[0035] More specifically, the method for recovering the monocular SLAM scale through detection and calibration proposed in this embodiment includes the following steps,
[0036] S1: Calibrate the camera through the calibration module 100;
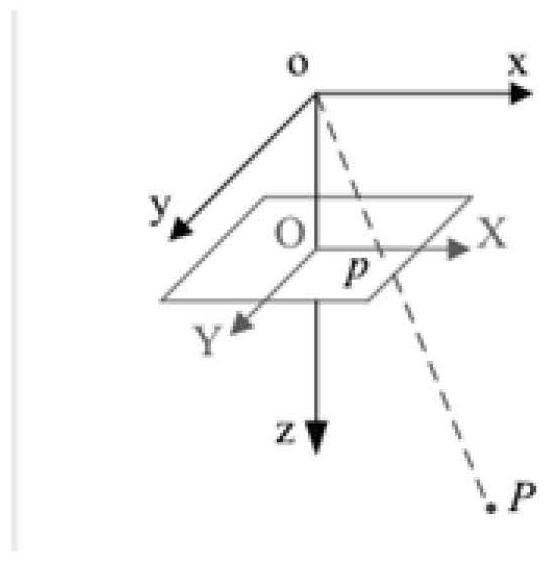
[0037] Among them, the camera calibration can use the pinhole camera model, and use Zhang Youzheng's camera calibration method for calibration. Specifically, refer to figure 2 The calibration also includ...
Embodiment 2
[0067] refer to Figure 6 To illustrate, in order to realize the above-mentioned method of recovering the monocular SLAM scale through detection and calibration, this embodiment proposes a system for recovering the monocular SLAM scale through detection and calibration. Specifically, the system includes a calibration module 100 , a calculation module 200 , a detection module 300 and a scale restoration module 400 . Among them, the calibration module 100 is used to calibrate the camera; the calculation module 200 is used to calculate the depth of the point on the plane from the camera; the detection module 300 can detect the marker; the scale restoration module 400 is used to restore the monocular SLAM scale .
[0068] It should be appreciated that embodiments of the invention may be realized or implemented by computer hardware, a combination of hardware and software, or by computer instructions stored in a non-transitory computer readable memory. The methods can be implement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More