

Non-overlapping field-of-view camera gesture calibration method based on point cloud feature map registration
A feature map and camera calibration technology, applied in image analysis, image enhancement, image data processing, etc., can solve problems such as low work efficiency, high work intensity, and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0055] The key technologies and specific implementation methods in the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
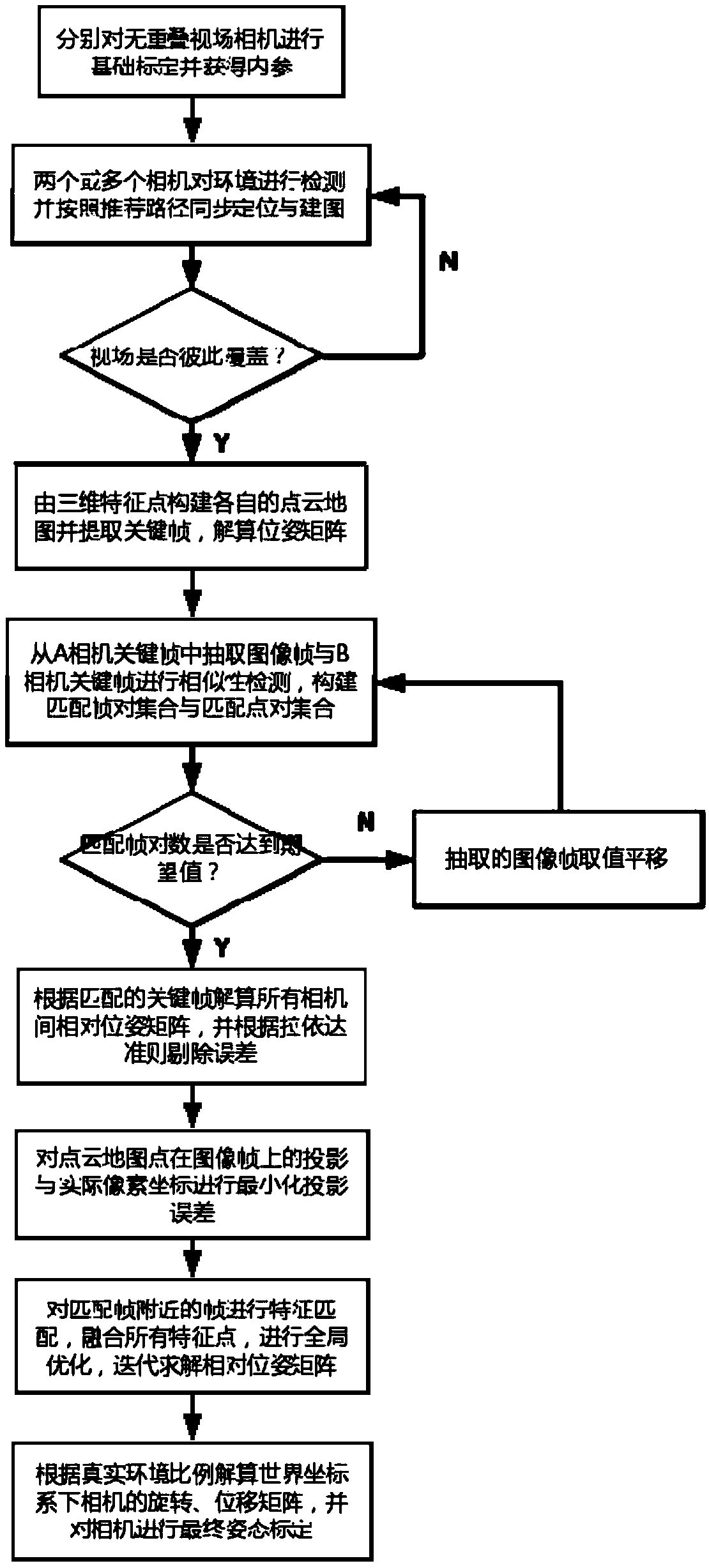
[0056] Such as figure 1 As shown, a method for camera calibration of non-overlapping field of view based on point cloud feature map registration of the present invention proposes a calibration scheme based on visual SLAM for the case of non-overlapping fields of view between multiple cameras. The core idea To: extract the image frame from the key frame of the camera, perform similarity detection with other camera key frames, construct a set of matching frame pairs and a set of matching point pairs, and make the number of matching frame pairs reach the expected value by extracting the value translation of the image frame, Calculate the relative pose matrix between all cameras according to the matched key frames, and eliminate the data with large errors according to the Raida criterion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More