

Underwater robot surface area fishing and capturing device and method for ocean engineering exploration
A robotic surface and ocean engineering technology, applied in the direction of ship salvage, transportation and packaging, ships, etc., can solve the problem of high failure rate, achieve the effect of large capture area, high capture success rate, and reduce structural volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
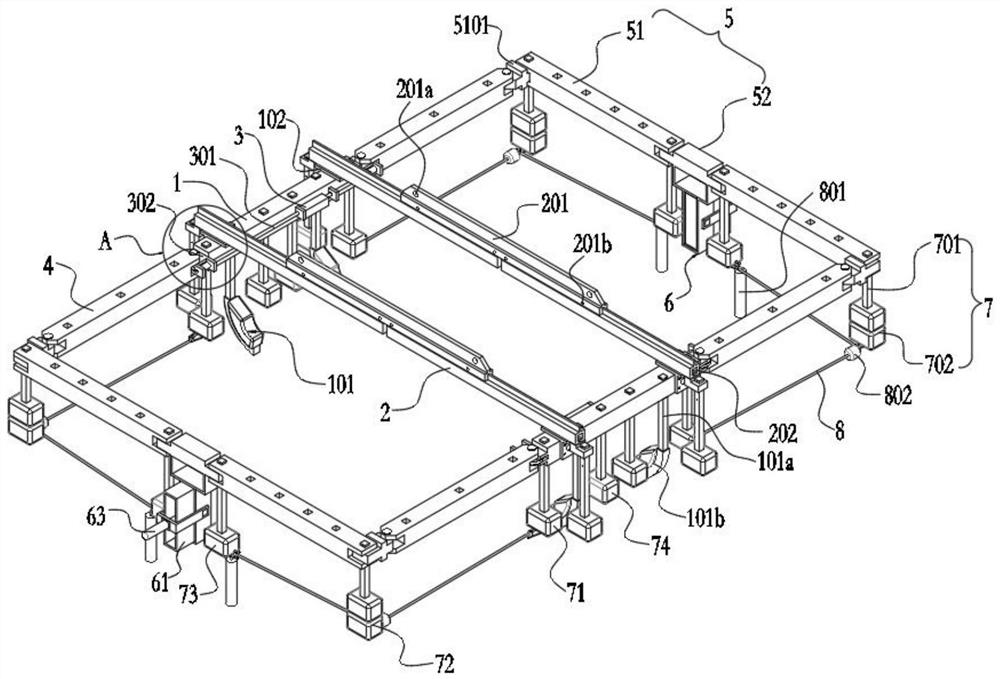
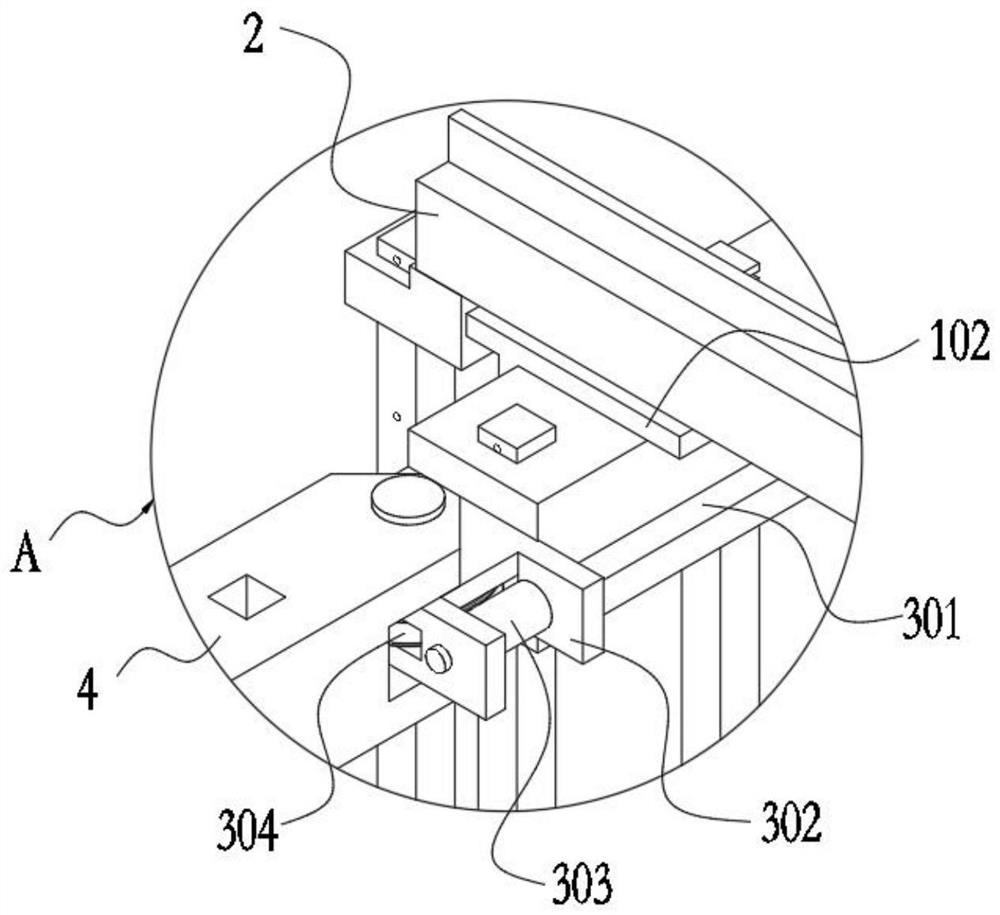
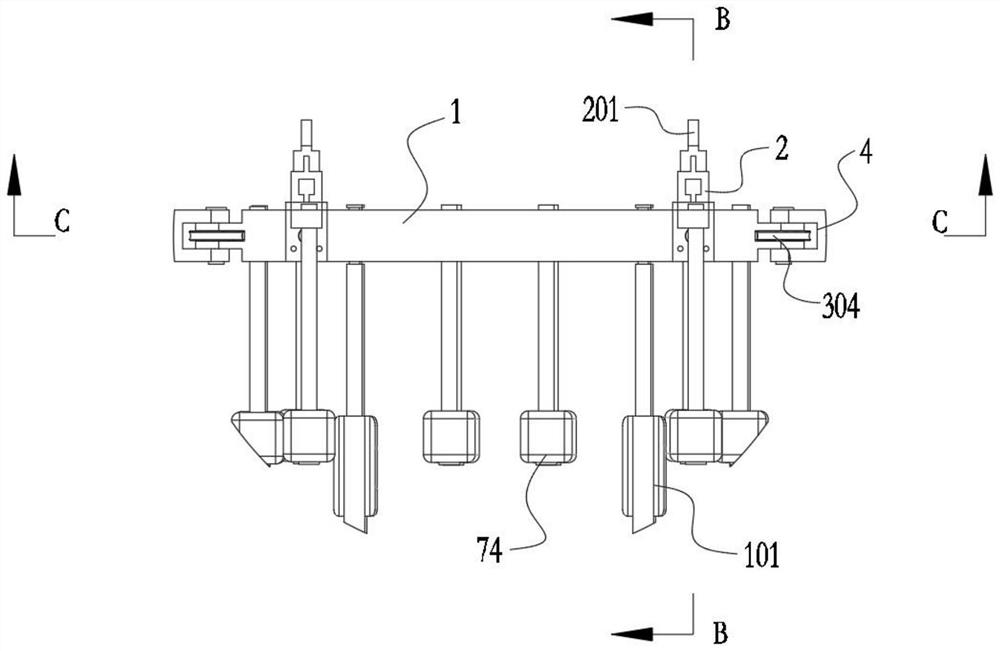
[0057] see Figure 1-13 , the present invention provides a technical solution: an underwater robot area salvage and capture device for marine engineering exploration, comprising:
[0058] Two central fixed beams 1 arranged in parallel with a variable spacing, and the tops of the two fixed beams 1 are slidingly connected to two positioning and hoisting slide rails 2 arranged in parallel and with a fixed spacing, such as Figure 1-4 , specifically: the tops of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More