

Unmanned aerial vehicle scene dense reconstruction method based on VI-SLAM and depth estimation network
A VI-SLAM and depth estimation technology, applied in the field of virtual reality, can solve the problem that large-scale scenes cannot be reconstructed quickly and densely
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] Below in conjunction with accompanying drawing and implementation example the present invention is described in further detail:
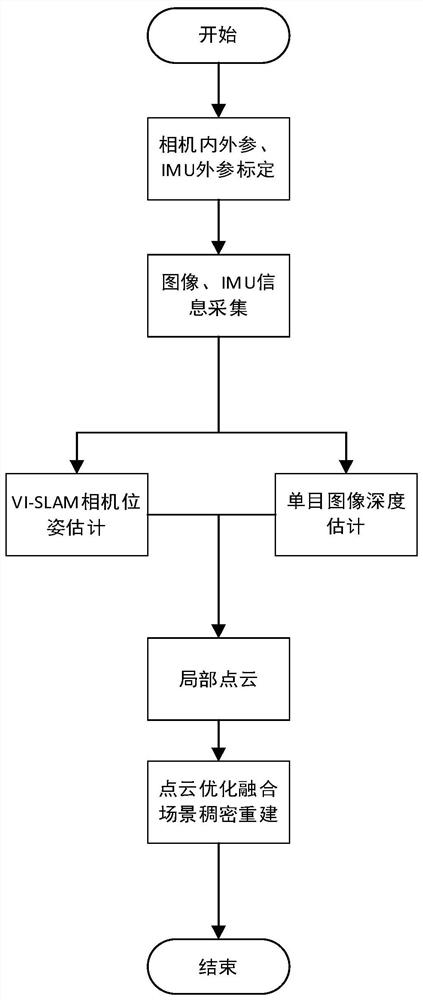
[0061] The basic operation of the UAV scene reconstruction method in the present invention is to use the UAV equipped with IMU components to take pictures of the three-dimensional environment, transmit the acquired information to the back end for processing, and output the densely reconstructed point cloud rendering of the UAV scene .
[0062] Such as figure 1 As shown, the steps of the UAV three-dimensional reconstruction method based on VI-SLAM and depth estimation network of the present invention are as follows:
[0063] (1) Fix the inertial navigation device IMU to the drone, and calibrate the internal and external parameters of the drone's own monocular camera and the external parameters of the IMU;
[0064] (2) Use the UAV monocular camera and IMU to collect the image sequence and IMU information of the UAV scene;
[0065] (3) Use V...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More