

Side-by-side obstacle avoidance type suction cup for crawler-type window cleaning robot
A robot and crawler-type technology, applied in the field of side-by-side obstacle-avoiding suction cups, can solve problems such as reduced operating efficiency, delayed cleaning time, and interruption of window cleaning operations, achieving the effects of improved efficiency, high flexibility, and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings.
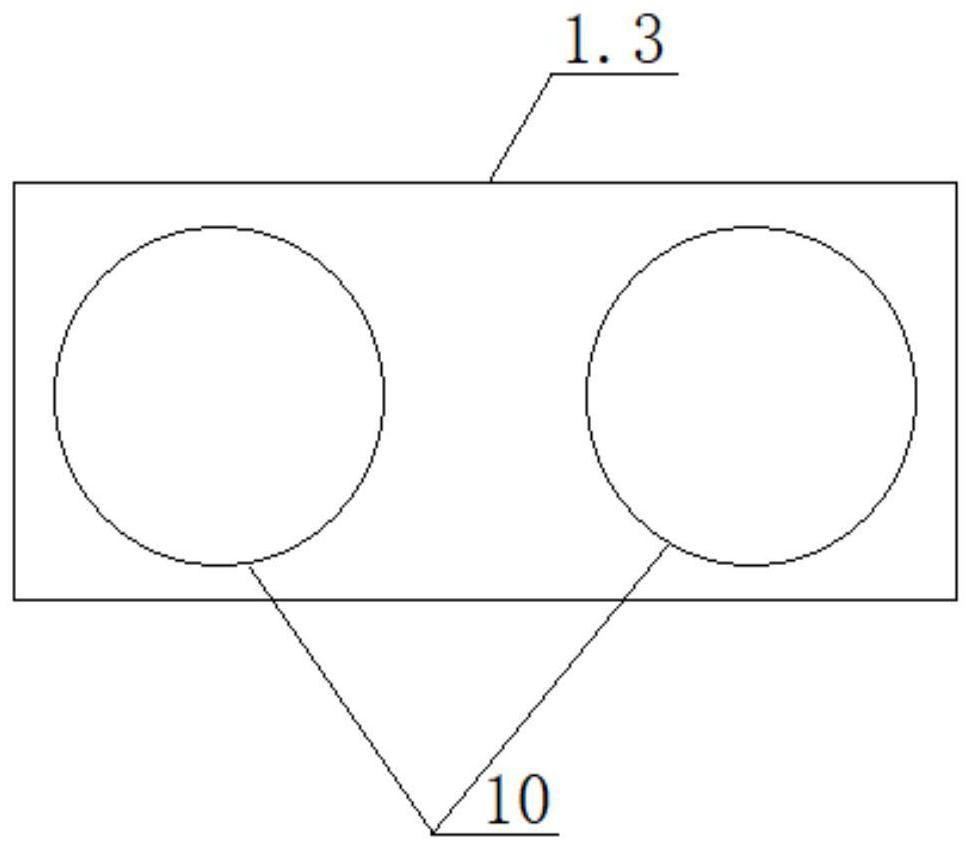
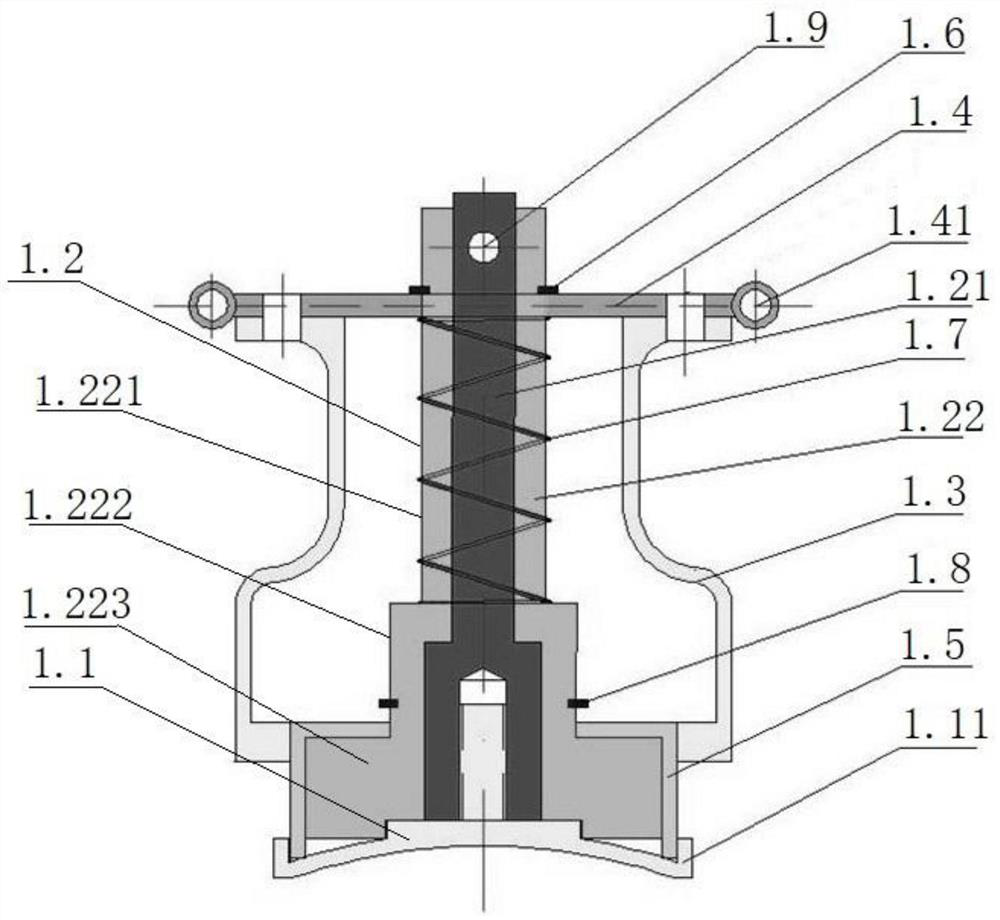
[0021] as attached figure 1 As shown, the side-by-side obstacle-avoiding suction cups include a suction cup frame cover 1.3 and an elastic movable telescopic suction cup 10, one of the suction cup frame casing 1.3 is embedded with two elastic movable telescopic suction cups 10, and two elastic movable telescopic suction cups 10 are arranged side by side; When the side-by-side obstacle-avoiding suction cups encounter an obstacle on the window glass and take an obstacle-avoiding action, one of the elastic movable telescopic suction cups 10 remains adsorbed on the window glass, and the other elastic movable telescopic suction cup 10 lifts off window glass. By setting the obstacle-avoiding suction cups side by side, the crawler-type window cleaning robot can effectively avoid obstacles on the window glass, so as to ensure the smooth progress of the crawler-type window-cle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More