Offline acceptance workshop of multi-line laser radar automatic driving equipment
An autonomous driving, multi-line laser technology, applied in radio wave measurement systems, instruments, etc., can solve the problems of unsuitable multi-line lidar offline acceptance, different detection methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] In order to further explain the technical solution of the invention, the invention will be described in detail below through specific examples.
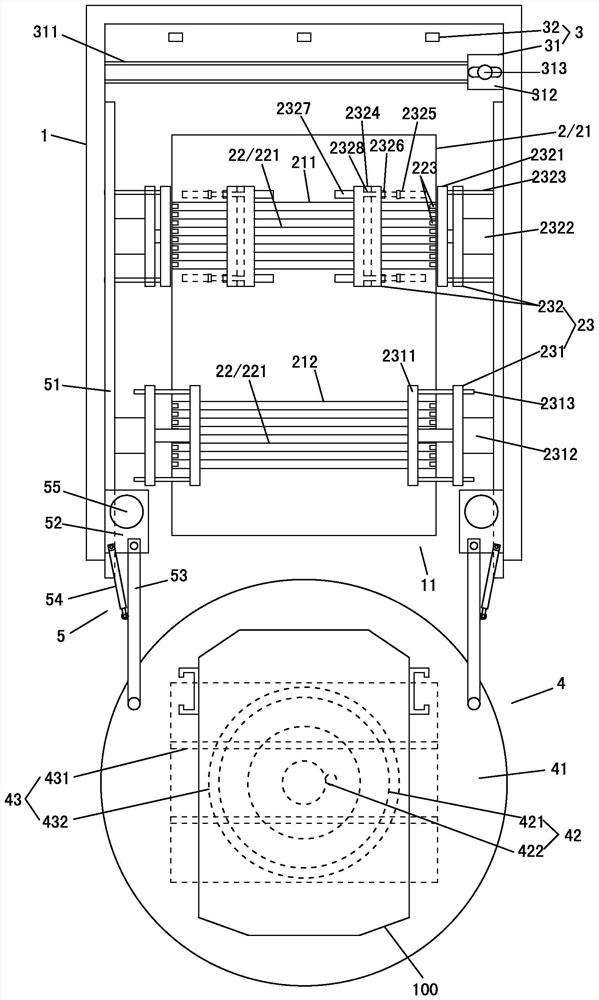
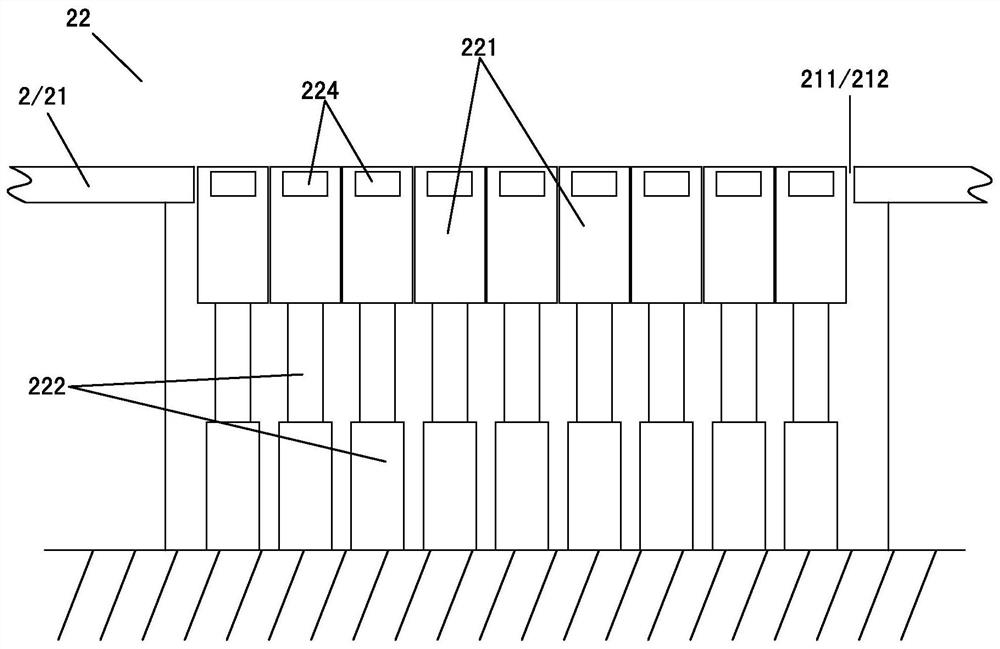
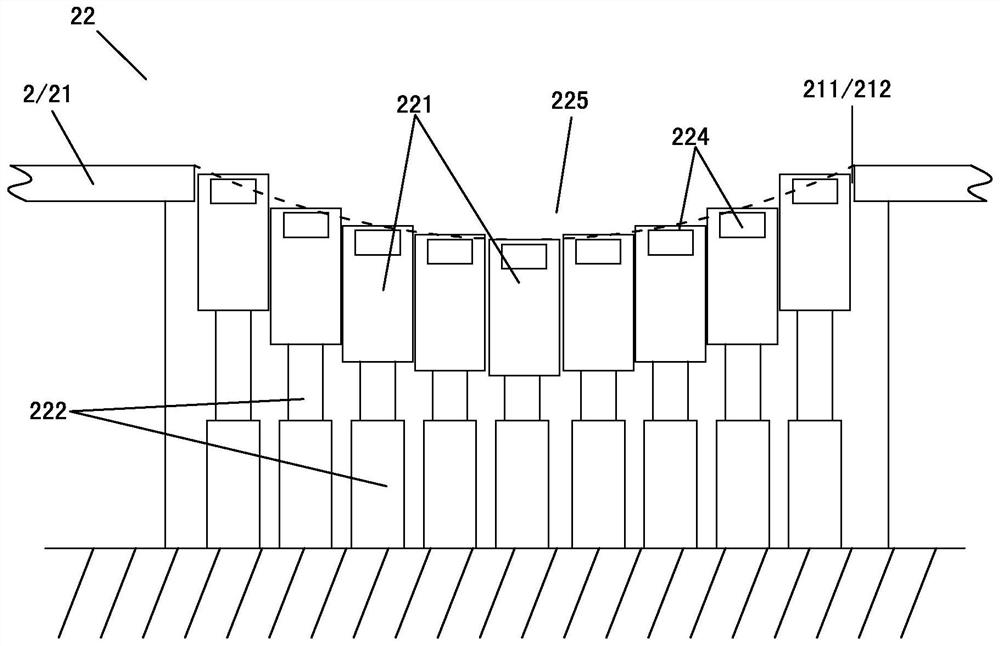
[0092] The off-line acceptance workshop of a multi-line laser radar automatic driving equipment disclosed by the present invention, such as figure 1 ,figure 2, image 3 , Figure 4 , Figure 5 and Image 6 As shown, it includes the main body of the workshop 1, the acceptance parking platform 2, the acceptance detection device 3, the equipment parking platform 4, the equipment traction device 5 and the acceptance control system (this system mainly includes the electronic control system of the circuit structure and the detection of the program part of the work. system, not visible in the diagram). The off-line acceptance workshop is used for the detection of multi-line laser radar of unmanned automatic driving patrol inspection, cleaning and other operating vehicles with multi-line laser radar. The automatic driving equipmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com