

Wheeled chassis robot inspection intelligent autonomous navigation method
A technology of autonomous navigation and robotics, applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., can solve problems such as inaccurate information collection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
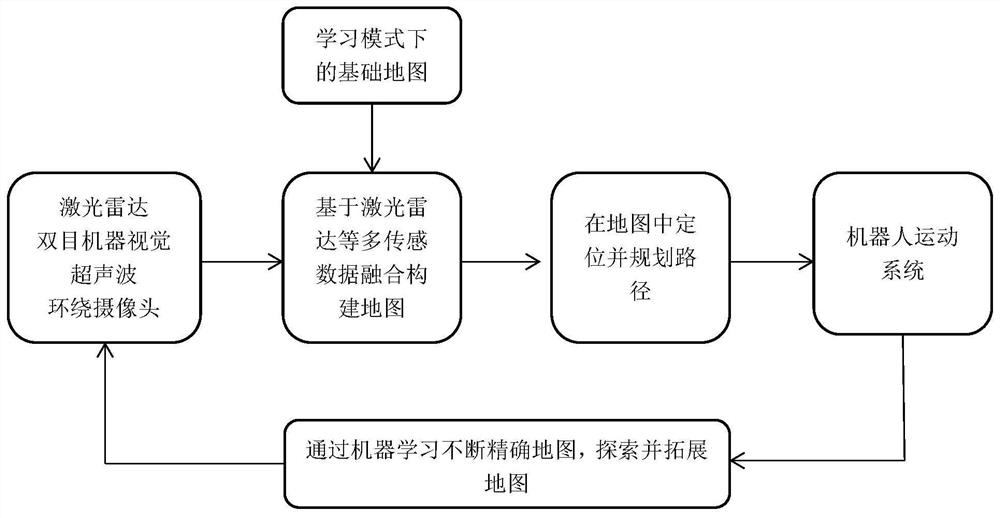
[0034] ginseng figure 1 As shown, the present embodiment provides a wheeled chassis robot inspection intelligent autonomous navigation method, including the following steps:
[0035] Step 1, obtain the multi-sensor data of the wheeled chassis robot, the multi-sensor data includes lidar data, binocular machine vision data, ultrasonic data, surround camera data;
[0036] Step 2, according to the acquired multi-sensor data, construct the current regional map based on the SLAM (Location and Mapping Technology) algorithm;
[0037] Step 3, based on the basic map in the learning mode and the current area map, fuse and construct the global 3D map of the inspection area, and dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More