

Pose trajectory estimation method based on image frame interpolation method
An image and pose technology, applied in the field of pose trajectory estimation based on the image interpolation method, can solve the problem of low recognition accuracy and achieve the effect of improving recognition accuracy, accuracy, and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific implementation process of the present invention is described in detail below, and examples of the specific implementation process are shown in the drawings, wherein the same or similar reference numerals represent the same or similar elements or elements with the same or similar functions. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
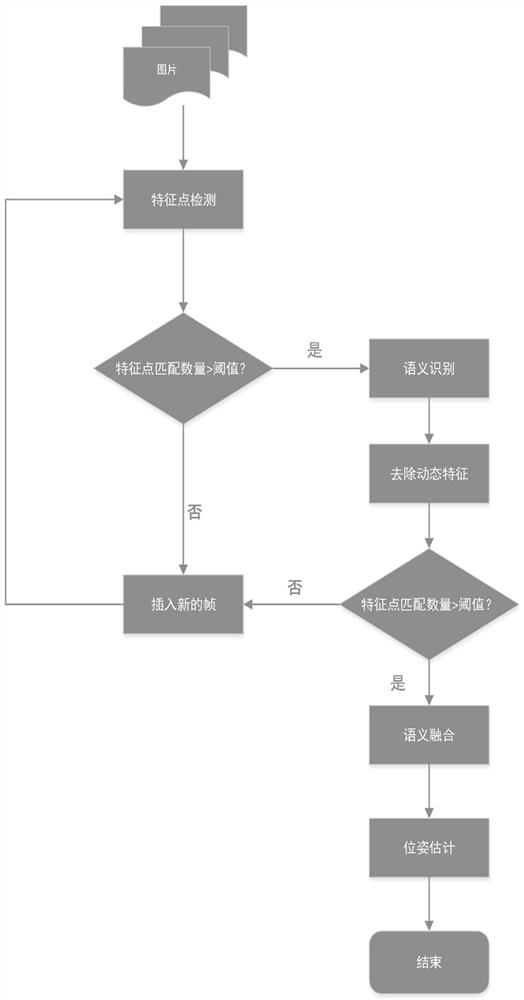
[0027] 1 image interpolation
[0028] When collecting images, it is inevitable that the camera moves too fast or the frame rate of the camera is too low, resulting in too little common view between two adjacent frames. Therefore, the use of video frame interpolation technology can effectively solve this problem.
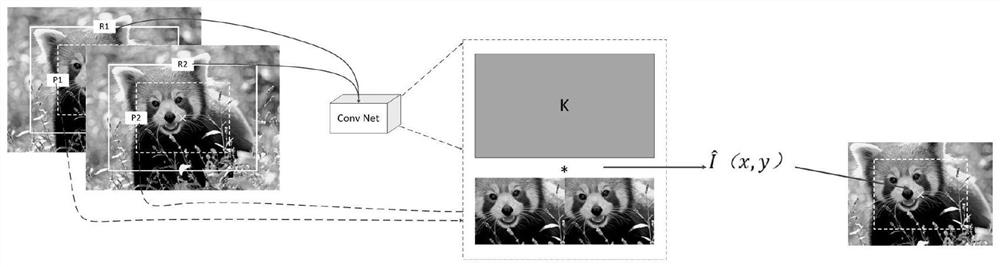
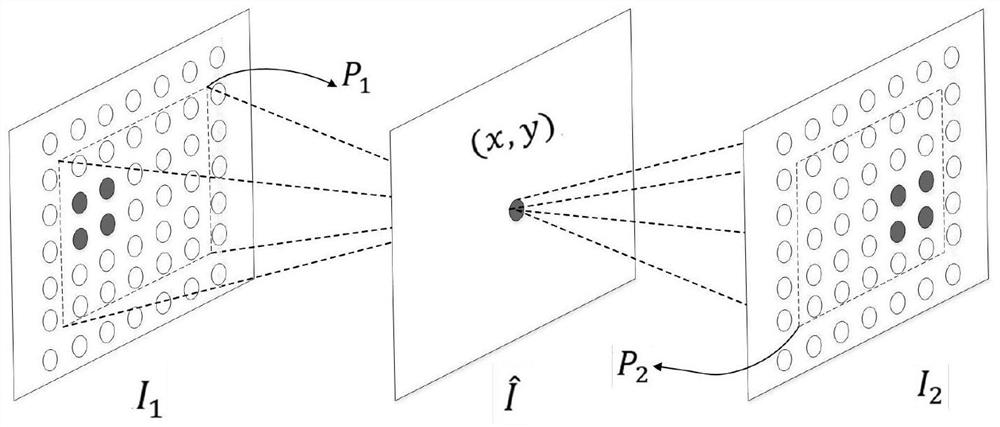
[0029] As a preferred solution, a robust video frame interpolation method is used, which utilizes a deep convolutional neural network to achieve frame interpolation without ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More