

6DOF object attitude estimation method based on deep learning point cloud matching
A technology of deep learning and point cloud matching, which is applied in neural learning methods, computing, biological neural network models, etc., can solve the problems of ICP algorithm lack of initial value and large amount of calculation, and achieve the effect of reducing the amount of calculation and improving the matching speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following describes several preferred embodiments of the present invention with reference to the accompanying drawings, so as to make its technical content clearer and easier to understand. The present invention can be embodied in many different forms of embodiments, and the protection scope of the present invention is not limited to the embodiments mentioned herein.
[0036] The technical problem to be solved by the present invention is how to improve the existing object attitude estimation method, so that the object attitude estimation method can not only greatly reduce the calculation amount and improve the matching speed, but also greatly improve the matching accuracy.
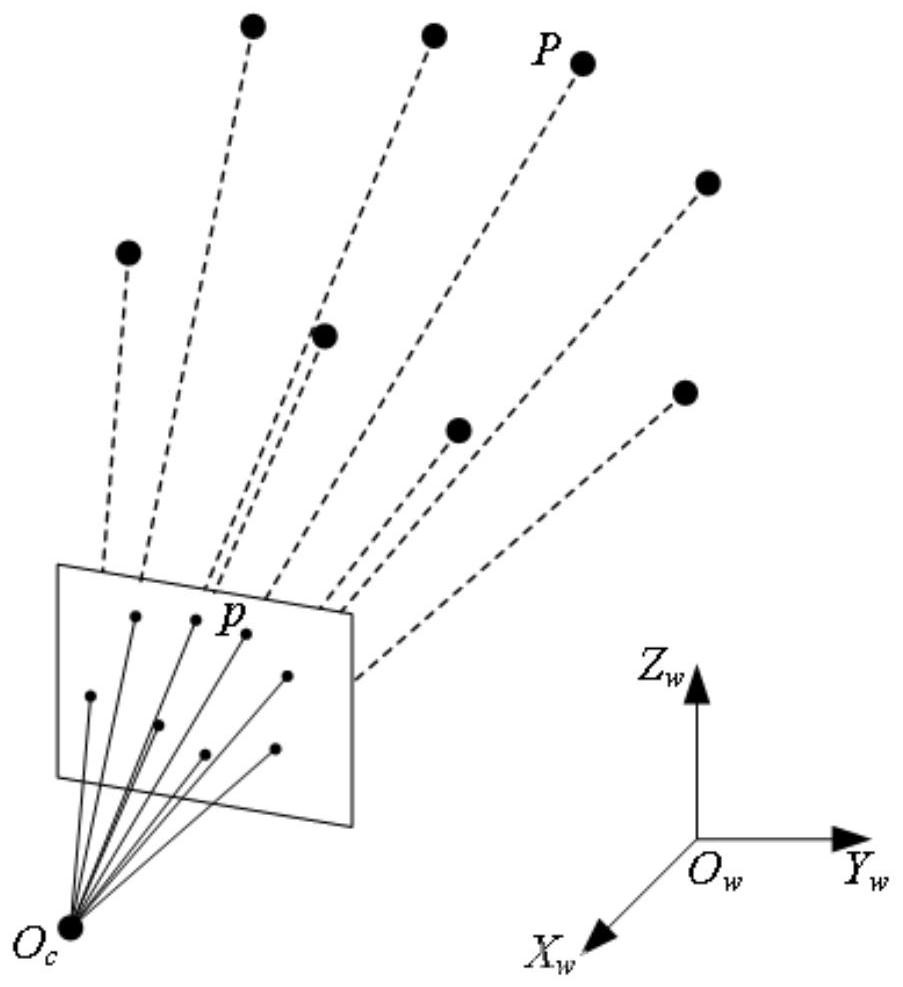
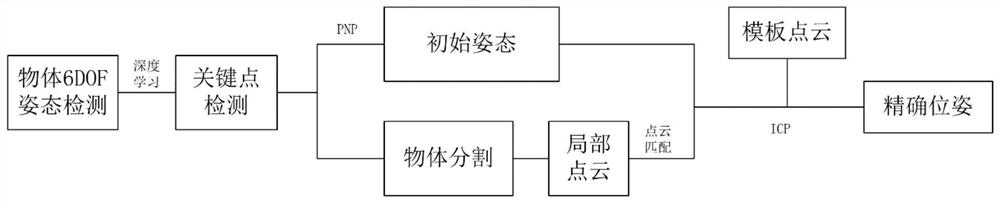
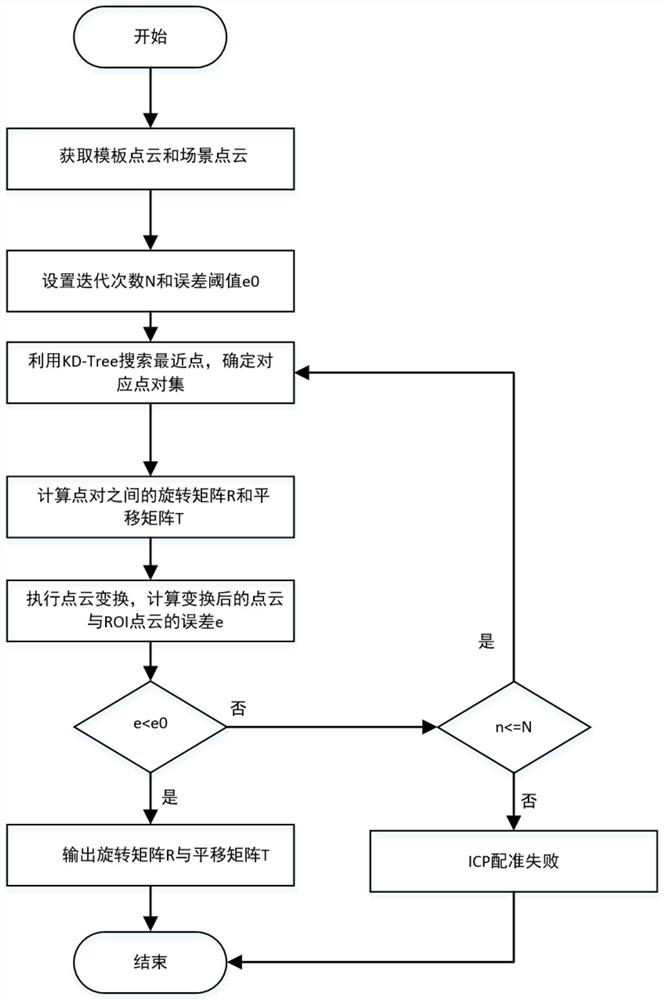
[0037] In order to achieve the above purpose, the present invention provides a 6DOF object pose estimation method based on deep learning point cloud matching, which matches template point cloud with local point cloud, which greatly reduces the amount of calculation and improves the matching speed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More