

A Fault Identification Method for EMU Traction Motors and Foreign Objects Clamped Between Axles
A traction motor and fault identification technology, applied in the field of image processing, can solve problems such as poor accuracy, and achieve the effects of increasing accuracy, reducing network overfitting, and improving detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0037] Specific implementation mode one: refer to image 3 Describe this embodiment in detail, a fault identification method for a traction motor of an EMU and a foreign object caught between shafts in this embodiment, comprising the following steps:
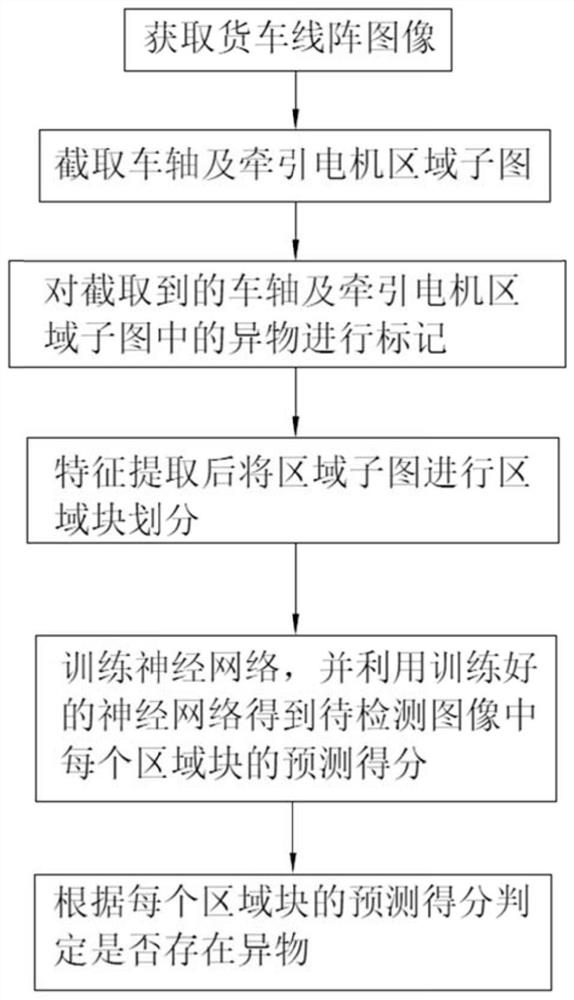
[0038] Step 1: Obtain the 2D linear array grayscale image of the truck;
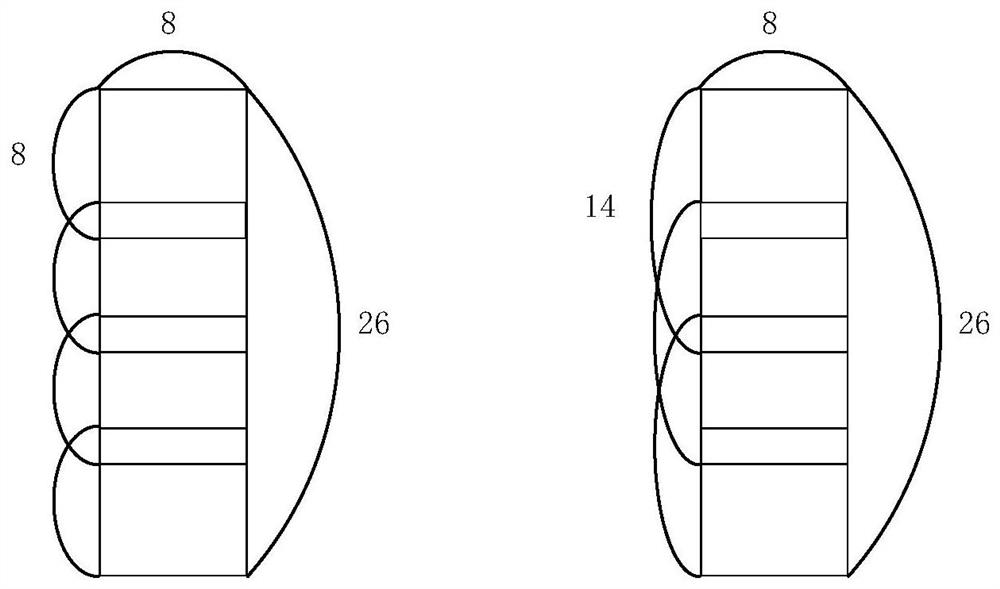
[0039] Step 2: According to the 2D linear array grayscale image of the truck, the sub-image of the axle and traction motor area is intercepted;
[0040] Step 3: Mark the foreign objects in the intercepted axle and traction motor area sub-images;
[0041] Step 4: Perform feature extraction on the marked axle and traction motor area submaps to obtain feature maps, then divide the feature maps into multiple area blocks, and use the divided feature maps as the training set to train the neural network;
[0042] Step 5: input the image to be detected into the trained neural network, and obtain the prediction score of each block corresponding to the image to be...
specific Embodiment approach 2
[0056] Specific embodiment 2: This embodiment is a further description of specific embodiment 1. The difference between this embodiment and specific embodiment 1 is that in step 2, the axle and traction motor area submaps are intercepted and provided based on prior knowledge, hardware and framework. The wheelbase information is used to intercept the submap of the axle and traction motor area.
specific Embodiment approach 3
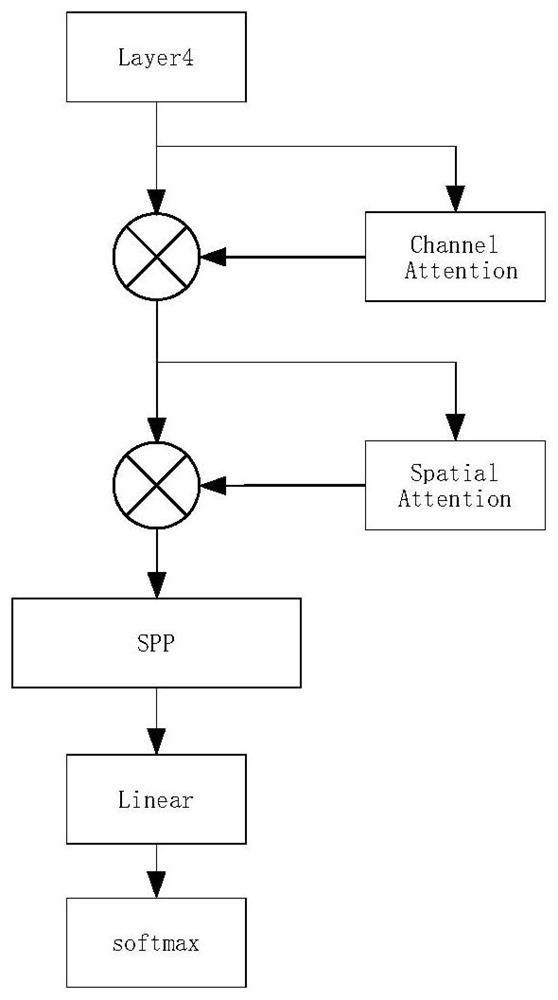
[0057] Embodiment 3: This embodiment is a further description of Embodiment 2. The difference between this embodiment and Embodiment 2 is that the core of the neural network is Resnet50, and layer4 in Resnet50 outputs a feature map.
[0058] This algorithm uses Resnet50 as the backbone, and uses the output of layer4 in Resnet50 as the feature map. The feature map is divided into regions to obtain region features.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More