

Three-dimensional point cloud automatic classification method based on graph convolutional neural network
A convolutional neural network and 3D point cloud technology, applied in neural learning methods, biological neural network models, neural architectures, etc., can solve the problem of low classification accuracy and achieve the effect of improving classification accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
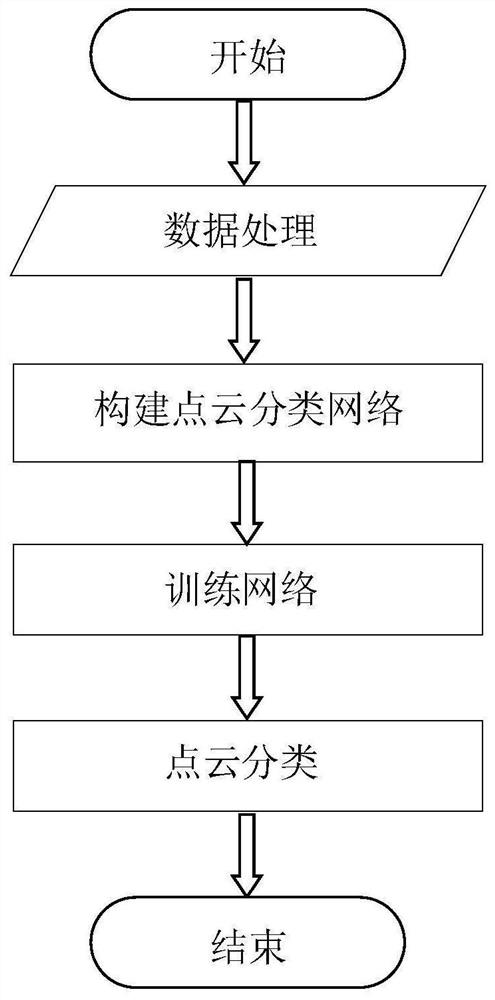
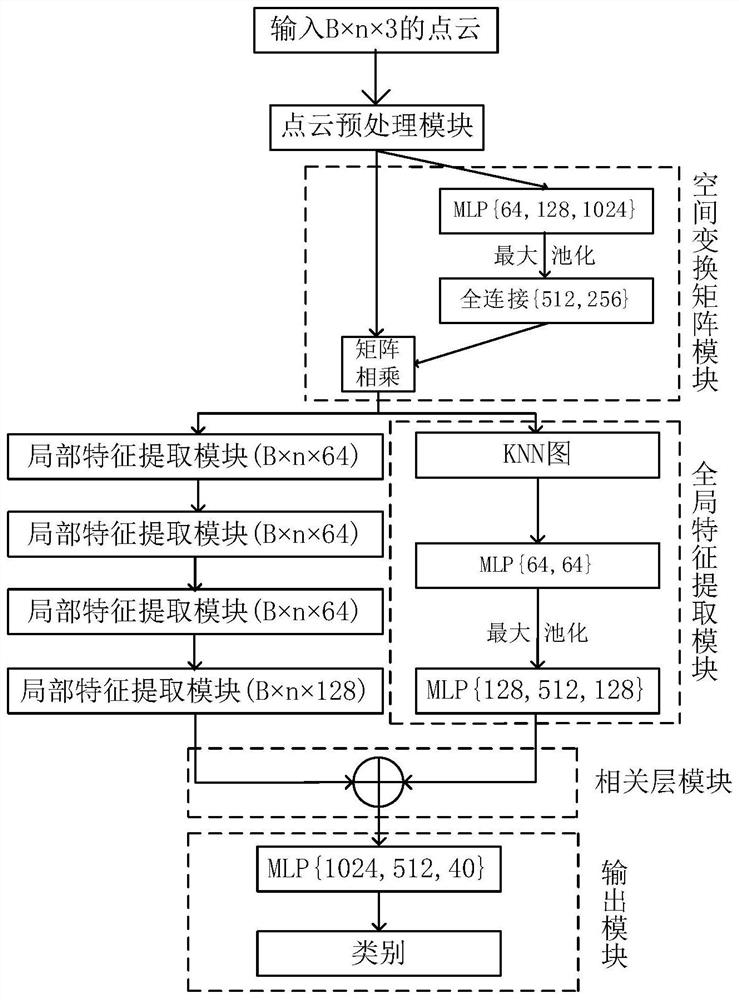
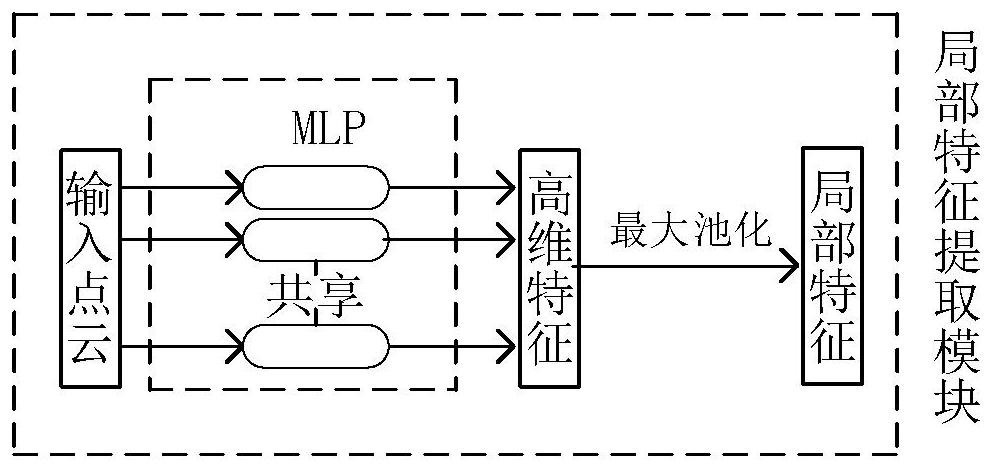
[0048] The purpose of the present invention is to provide a three-dimensional point cloud automatic classification method based on graph convolutional neural network, which is used for automatic classification and recognition of complex objects in the process of grabbing three-dimensional objects by service robots, so as to facilitate the determination of the grabbing position according to the category information Crawling can complete the training of the network end-to-end without any post-processing. The 3D point cloud automatic classification method of the graph convolutional neural network of the present invention can not only extract local fine-grained features but also integrate contextual semantic information, significantly improving classification accuracy.
[0049] The present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More