

A flexible grasping device for industrial robots
An industrial robot and grasping device technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of incapable of grasping workpieces of different shapes, increase work intensity, reduce daily output, etc., so as to reduce maintenance costs and improve work. Efficiency, avoid the effect of reducing the service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
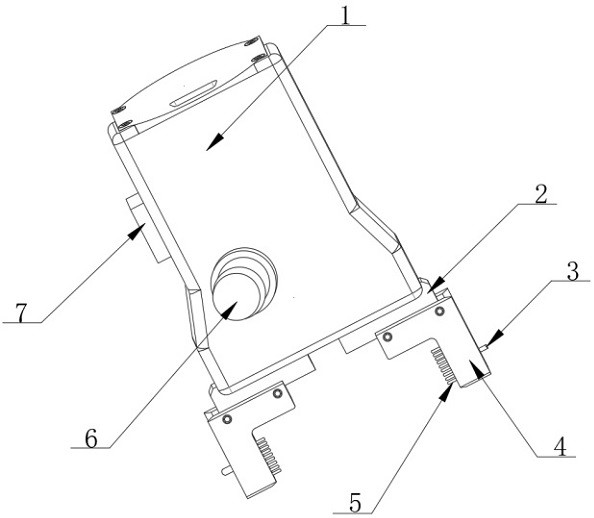
[0020] see Figure 1-5 , in an embodiment of the present invention, a flexible grabbing device for an industrial robot includes a housing 1, two sliding seats 2 are symmetrically slidably connected to the bottom of the housing 1, and guides are fixed on both sides of the sliding seat 2 The inner side of the plate 10 and the housing 1 is provided with a guide groove matching with the guide plate 10, which can play the role of limit guide and ensure the stability of displacement.
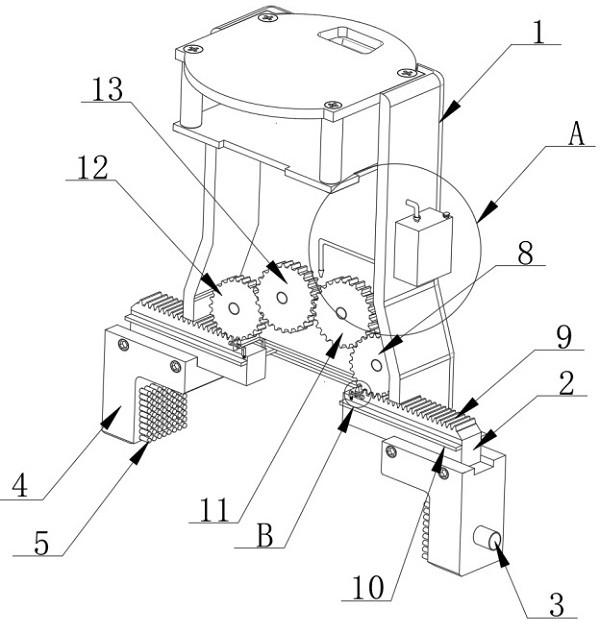
[0021] The front side of housing 1 is equipped with driving motor 6, and the inside of housing 1 is connected with the driving gear 13 that links to each other with driving motor 6 power transmission shafts, and the inside of housing 1 is positioned at one side of driving gear 13 and is connected with The drive gear 13 is meshed with the linkage gear 11, the inside of the housing 1 is located at the position below the other side of the drive gear 13 and is rotatably connected with the second transmiss...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More