

Unmanned aerial vehicle operation path planning method and device, unmanned aerial vehicle and medium
A path planning and drone technology, applied in the field of drones, can solve problems such as increasing the energy consumption of drones, increasing the non-operating distance of drones, and reducing the operating time and area of drones.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
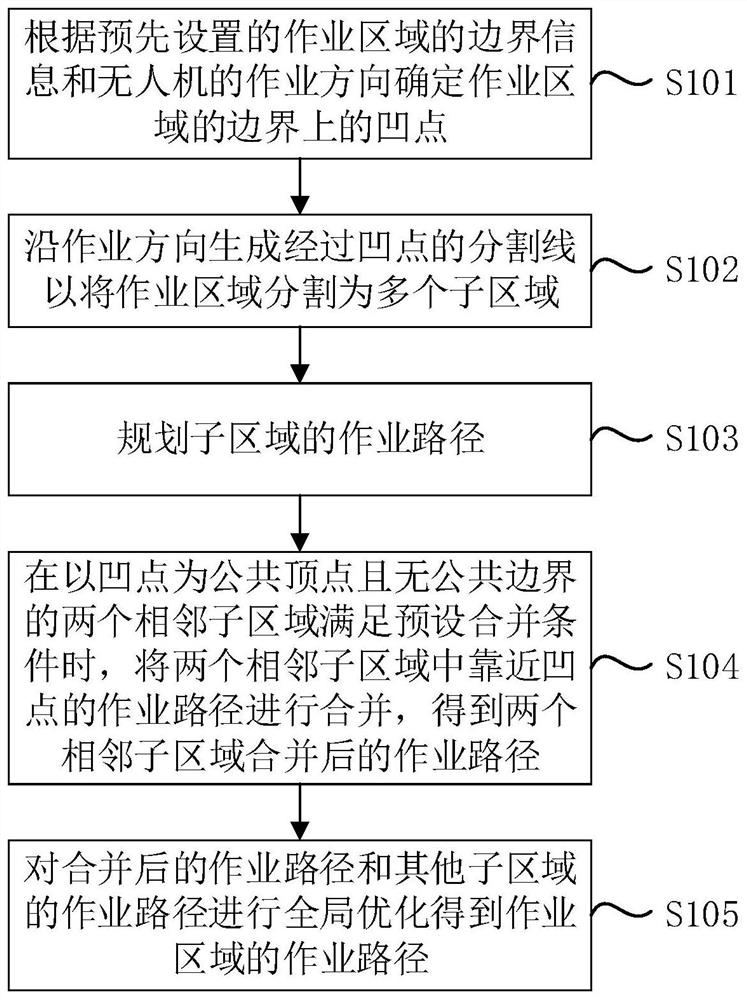
[0110] Figure 2A It is a flow chart of a UAV operation path planning method provided by Embodiment 1 of the present invention. This embodiment can be applied to the situation of planning an operation path when there are concave points on the boundary of the operation area. This method can be provided by the embodiment of the present invention. UAV operation path planning device, which can be implemented in the form of software and / or hardware, and integrated in the UAV, such as Figure 2A As shown, the method specifically includes the following steps:
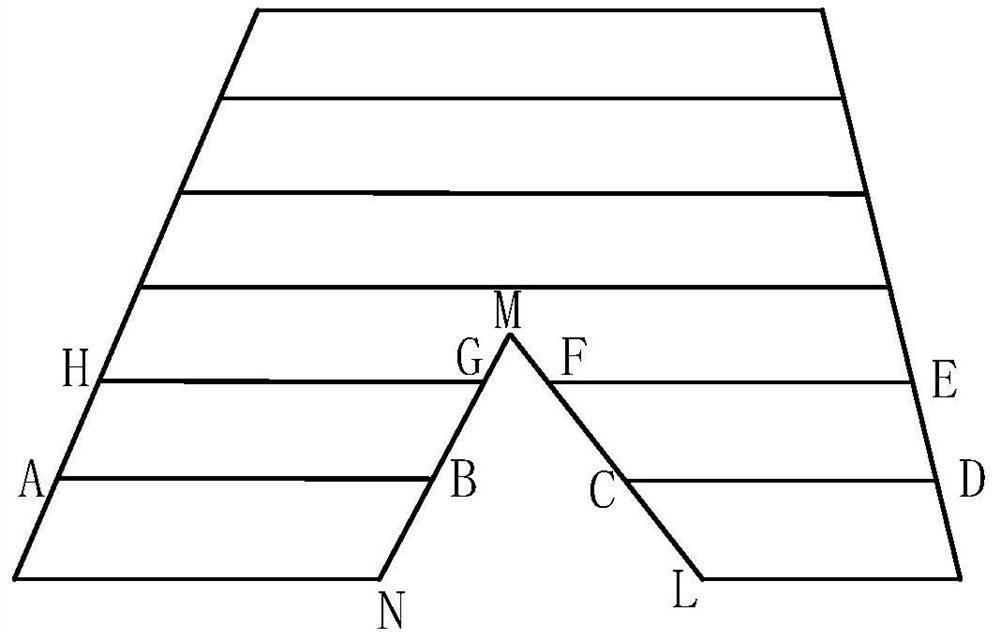
[0111] S101. Determine the concave point on the boundary of the working area according to the preset boundary information of the working area and the working direction of the drone.
[0112] Wherein, the operation area may be an area where plant protection crops are planted, such as forest or farmland, etc., and the boundary of the operation area may be the boundary of forest or farmland. UAV operations can be plant protection...
Embodiment 2
[0137] Figure 3A It is a flow chart of a UAV operation path planning method provided by Embodiment 2 of the present invention. The embodiment of the present invention is optimized on the basis of the foregoing Embodiment 1, and an exemplary implementation method of the present invention is described in detail. Specifically, as Figure 3A As shown, the method in the embodiment of the present invention may include the following steps:
[0138]S201. Determine the concave point on the boundary of the working area according to the preset boundary information of the working area and the working direction of the drone.
[0139] Specifically, the boundary information of the operation area can be determined in advance through manual surveying and mapping or by drone aerial photography, and the boundary information can be stored in a remote server or the local memory of the drone, and the boundary information can be called when needed. Wherein, the boundary information may include pos...
Embodiment 3
[0190] Embodiment 3 of the present invention provides a UAV operation path planning device, Figure 4 A schematic structural diagram of an unmanned aerial vehicle operation path planning device provided in Embodiment 4 of the present invention, as shown in Figure 4 As shown, the device may specifically include:
[0191] The concave point determination module 301 is used to determine the concave point on the boundary of the operation area according to the boundary information of the preset operation area and the operation direction of the drone;
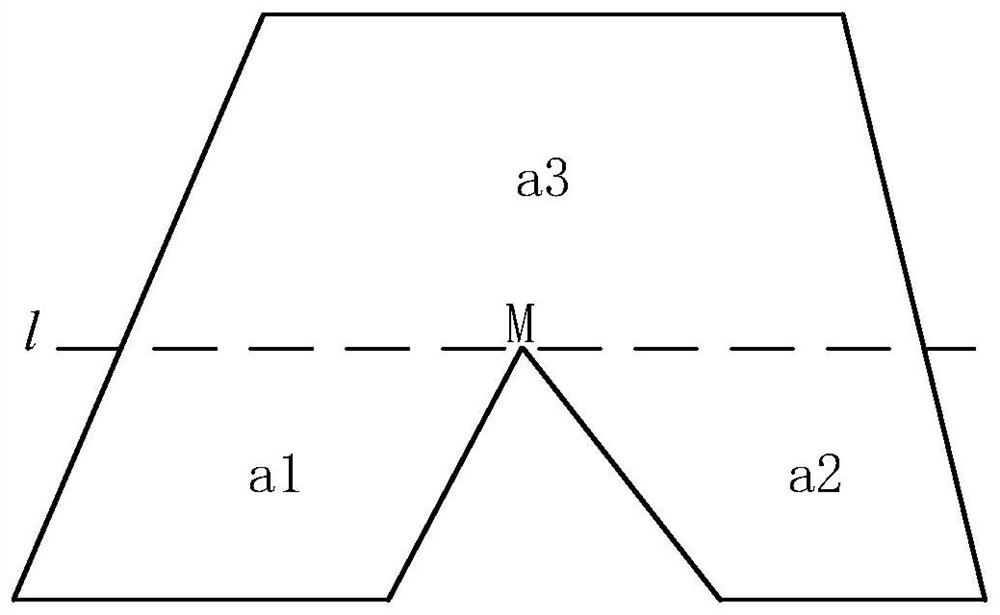
[0192] An area segmentation module 302, configured to generate a dividing line passing through the concave point along the working direction to divide the working area into a plurality of sub-areas;
[0193] Path planning module 303, configured to plan the operation path of the sub-area;
[0194] A path merging module 304, configured to combine the two adjacent sub-areas close to the concave point when two adjacent sub-areas with t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More