

Glue dispenser motion planning method and system based on trajectory look-ahead
A technology of motion planning and dispensing machine, which is applied to the device and coating of surface coating liquid, which can solve the problems of poor dispensing quality and achieve continuity, improve poor dispensing quality and smooth transition Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
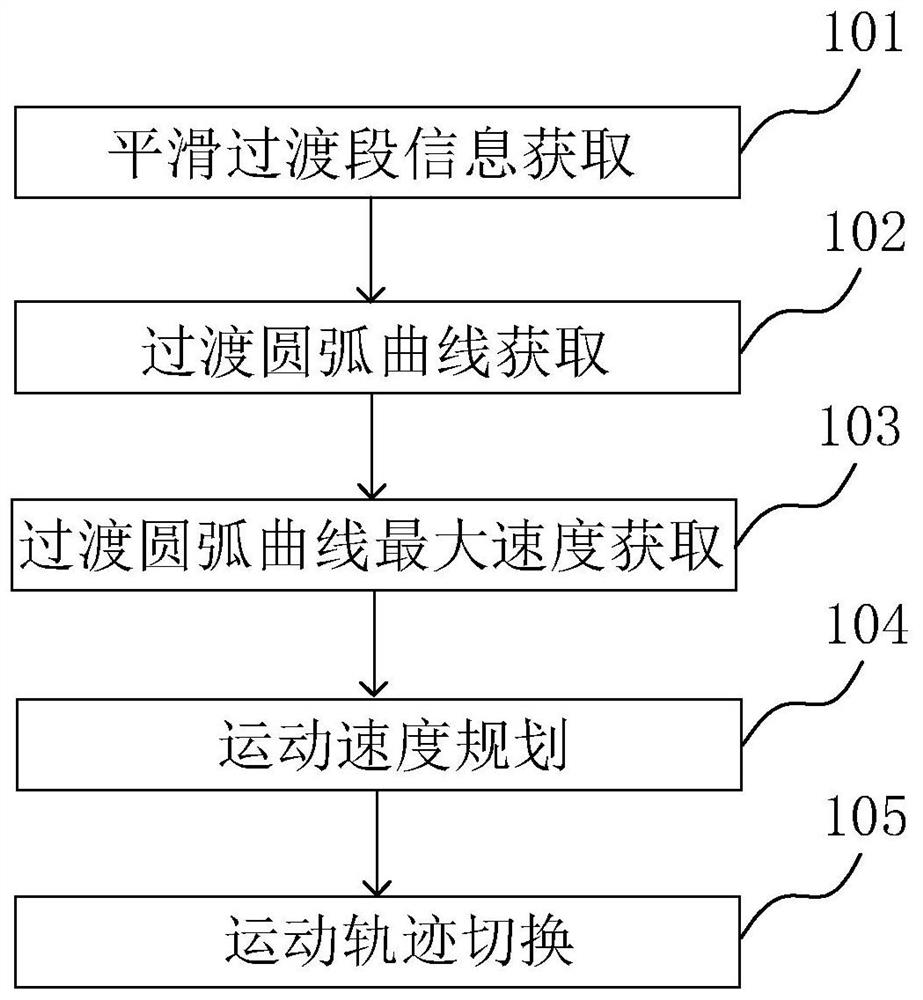
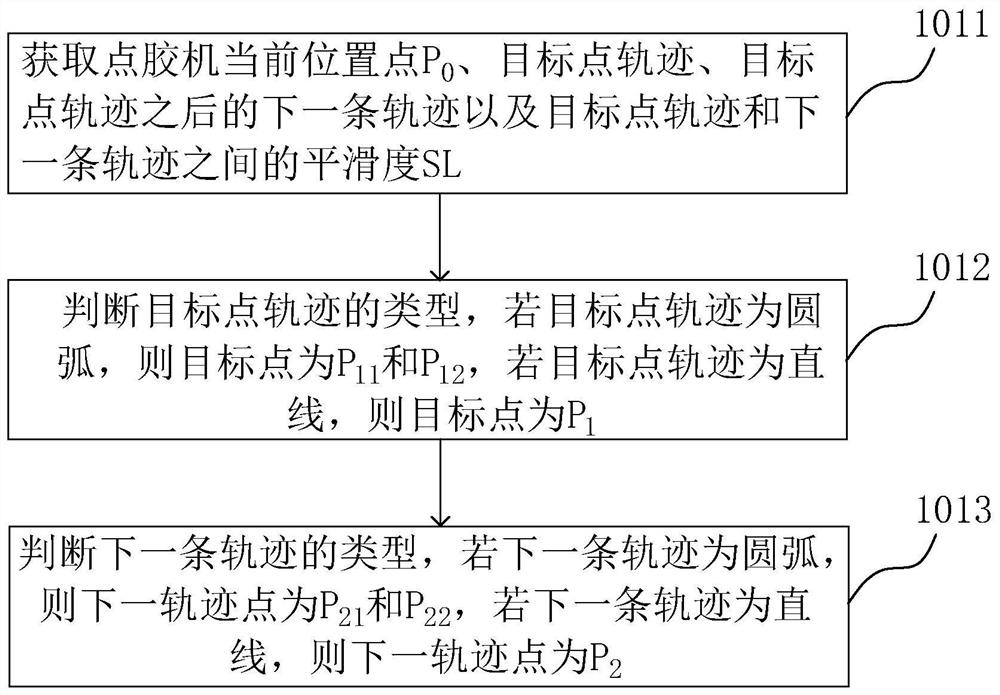
[0074] refer to figure 2 and image 3 , as an implementation of smooth transition segment information acquisition 101, including the following steps:
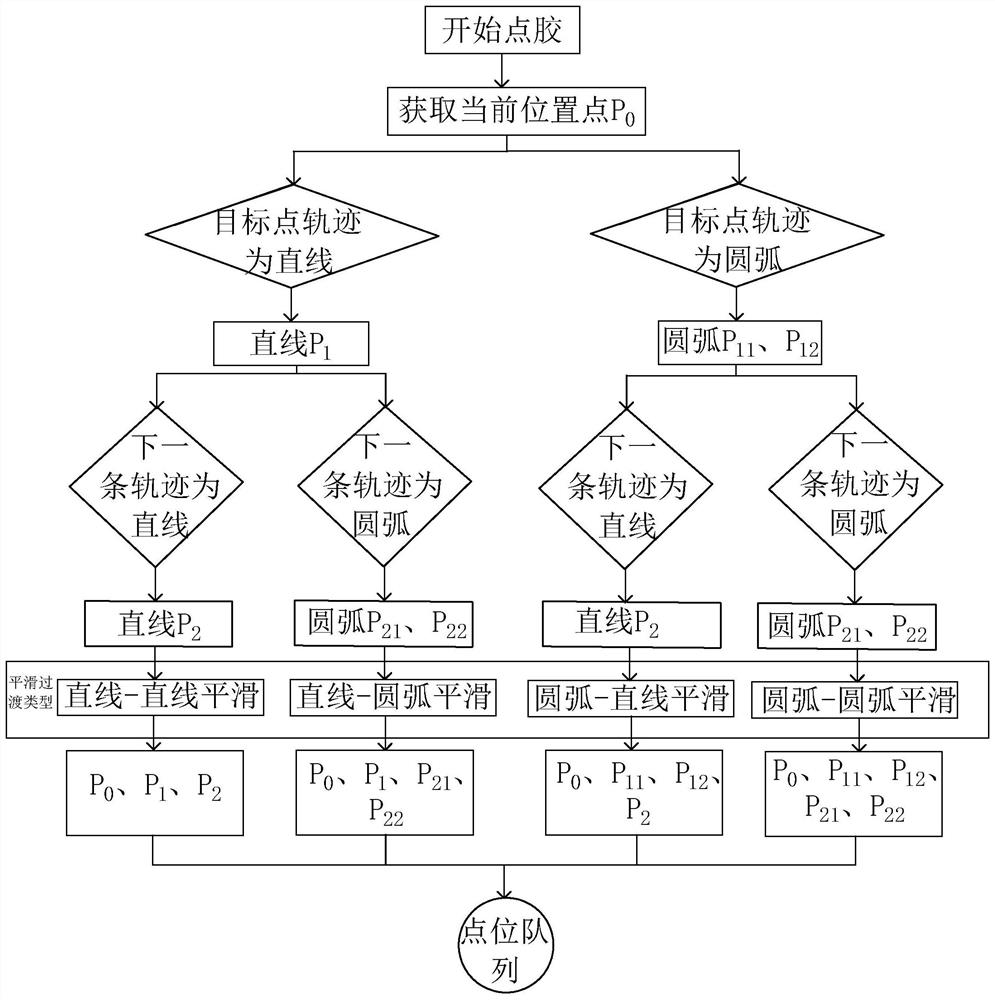
[0075] 1011. Obtain the current position point P of the dispenser 0 , the target point trajectory, the next trajectory after the target point trajectory, and the smoothness SL between the target point trajectory and the next trajectory.
[0076] Among them, when teaching the dispensing robot, the length of each dispensing track has been set, so the dispensing robot points P according to its current position. 0 , which can obtain the target point trajectory and the next trajectory.
[0077] 1012. Determine the type of target point trajectory, if the target point trajectory is an arc, then the target point is P 11 and P 12 , if the trajectory of the target point is a straight line, then the target point is P 1 .
[0078] Among them, P 11 is the target point trajectory, that is, the midpoint of the arc, P 12 is the targe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More