

A quadruped walking robot and its walking method
A walking robot, robot technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of poor speed, load and stability, large volume and weight, complex mechanical structure, etc., to achieve convenient operation and simplify the mechanical structure. , the effect of high walking flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
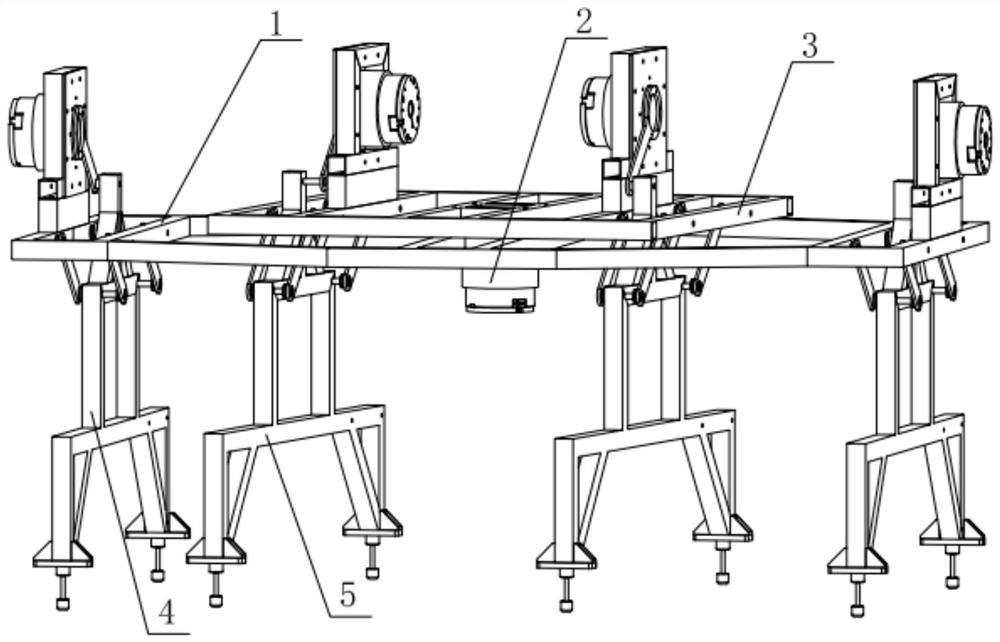
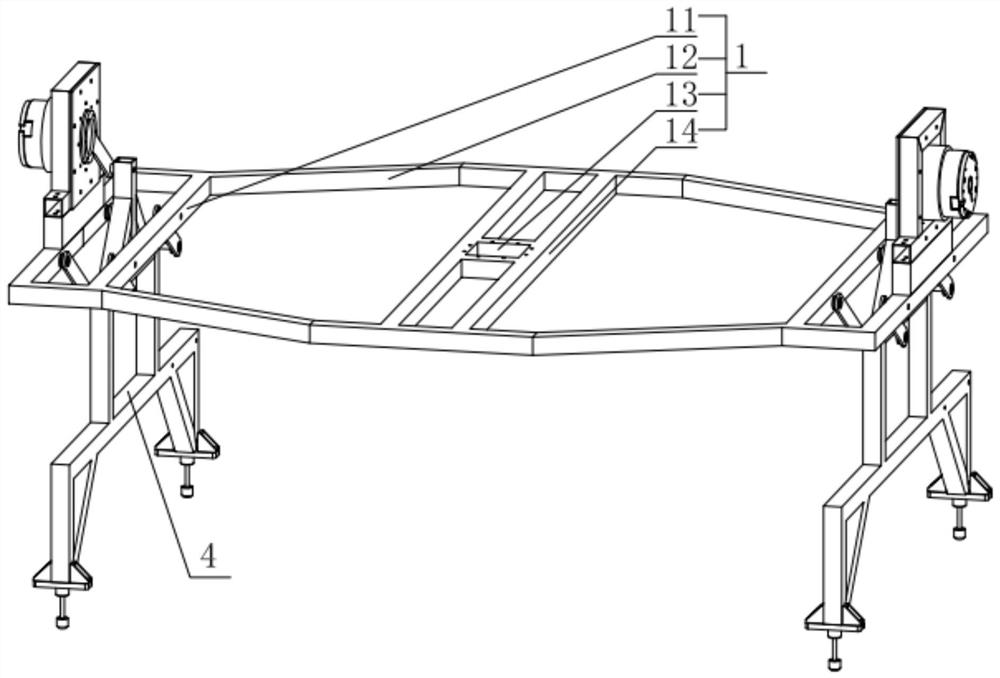
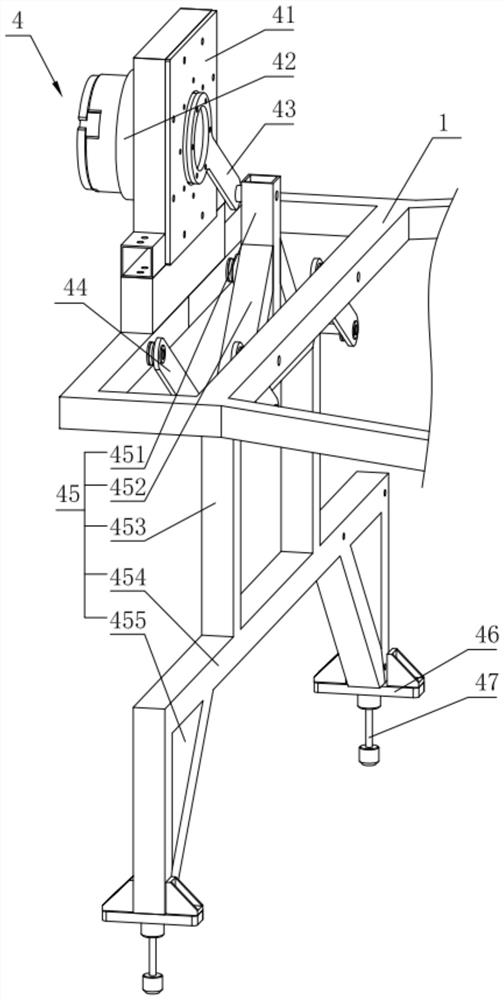
[0033] Such as figure 1 As shown, a quadruped walking robot of this embodiment includes a main body 1, on which an outer foot assembly 4 is installed symmetrically left and right, on the middle part of the main body 1, an auxiliary body 3 is installed, and on the auxiliary body 3 is installed symmetrically Inner foot assembly 5; two groups of inner foot assemblies 5 are located on the inner sides of two groups of outer foot assemblies 4, forming quadrupeds for robot walking; two groups of inner foot assemblies 5 move back and forth synchronously with respect to auxiliary body 3 under power drive, two groups of outer foot assemblies 4 The foot assembly 4 moves forward and backward synchronously with respect to the main body 1 under the drive of power; through the alternate forward or backward movement of the outer foot assembly 4 and the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More