

A vehicle lane keeping method and system based on preview area control
A lane keeping and lane keeping technology, which is applied in the field of vehicle lane keeping method and system based on preview area control, can solve the problems of increasing the driver's psychological burden by steering wheel control frequency, selecting a controller, and a large amount of calculation, etc., to achieve subjective experience Good, overcome the effect of low precision and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
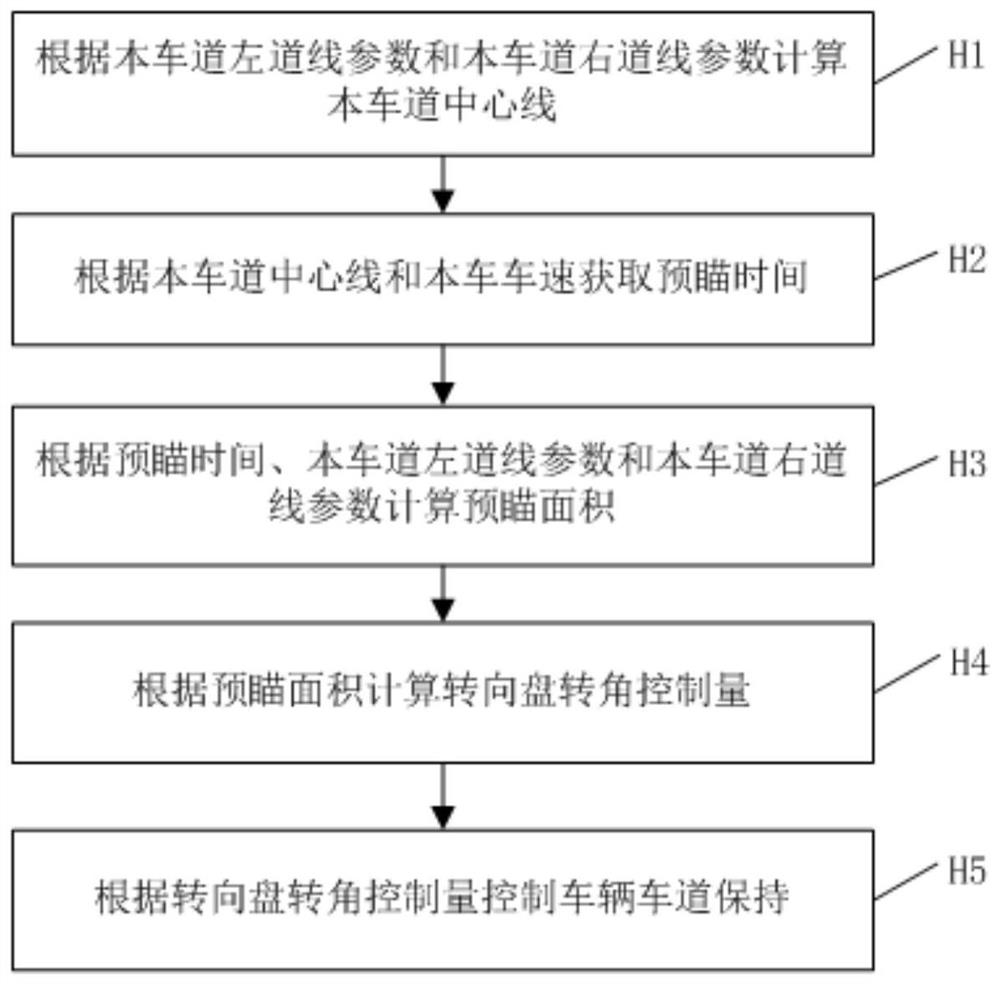
[0059] Such as figure 1 As shown, the present embodiment provides a vehicle lane keeping method based on preview area control, comprising the following steps:
[0060] H1, calculate the center line of this lane according to the parameters of the left lane line of this lane and the parameters of the right lane line of this lane;
[0061] H2, obtain the preview time according to the center line of the lane and the speed of the vehicle;
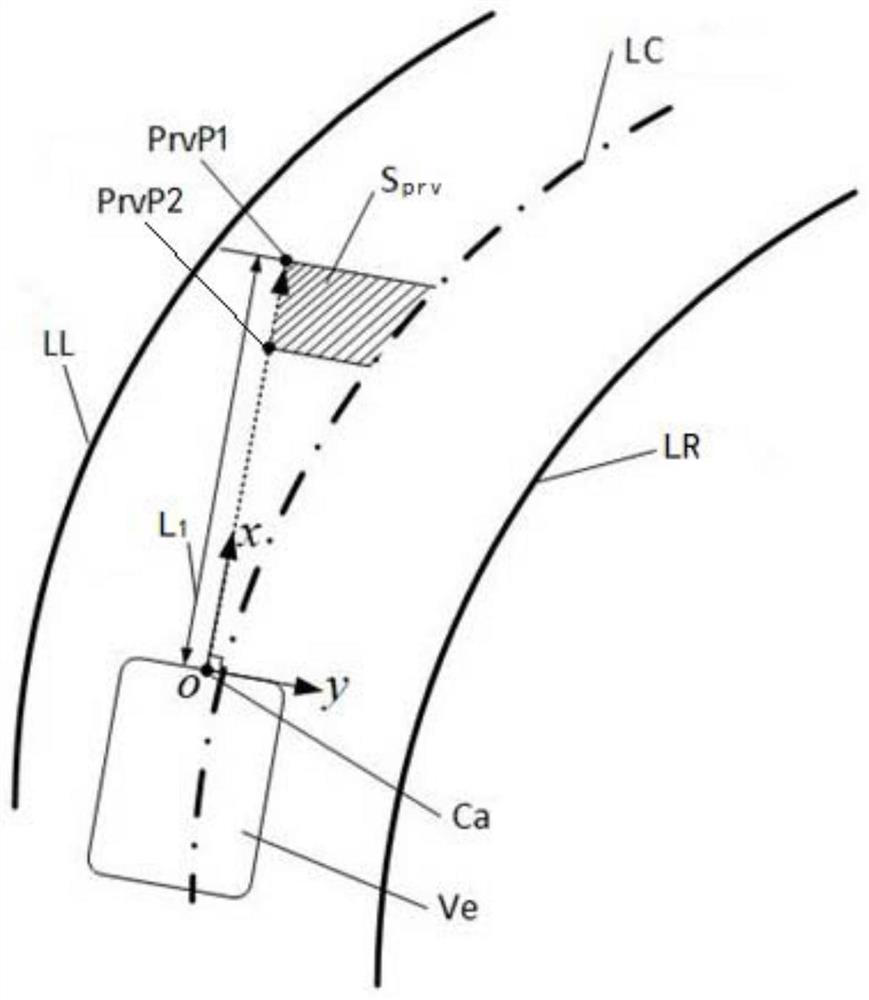
[0062] H3, calculate the preview area according to the preview time, the parameters of the left lane line of this lane and the parameters of the right lane line of this lane;
[0063] H4, calculate the steering wheel angle control amount according to the preview area;
[0064] H5, control the lane keeping of the vehicle according to the control amount of the steering wheel angle.
[0065] It should be noted that the parameters of the left lane line of this lane include the parameters of four aspects: the lateral deviation of the left lane lin...
Embodiment 2
[0093] Such as Figure 4 As shown, this embodiment provides a vehicle lane keeping system based on preview area control, which includes the following functional modules.
[0094] Calculation module 6 of the center line of this lane: calculate the center line of this lane according to the parameters of the left lane line of this lane and the parameters of the right lane line of this lane;
[0095] Dynamic preview time calculation module 3: obtain the preview time according to the center line of the lane and the speed of the vehicle;
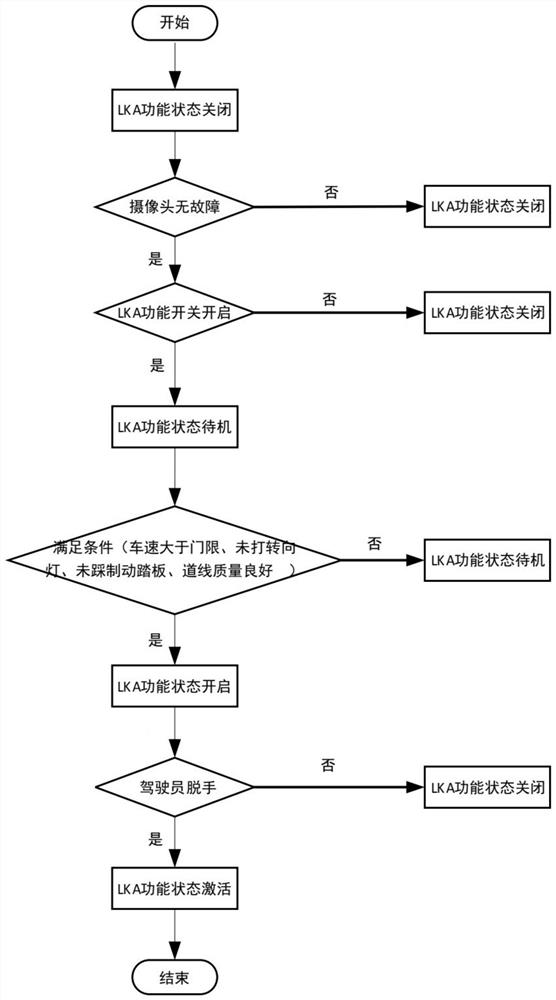
[0096] LKA function opening and closing request condition module 2: judge whether the lane keeping system is activated, and input the judgment result into the LKA core algorithm module 4;
[0097]LKA core algorithm module 4: Calculate the preview area according to the preview time, the parameters of the left lane of the lane and the parameters of the right lane of the lane, and calculate the steering wheel angle control amount according to the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More