

Method for creating and updating three-dimensional grid map based on roadside laser radar
A technology of laser radar and grid map, which is applied in the direction of road network navigator, electromagnetic wave re-radiation, measuring device, etc., can solve the problems of inability to meet the requirements of non-line-of-sight environment perception and limited perception distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to better illustrate the method for creating and updating the three-dimensional grid map proposed by the present invention, the specific implementation will be described in detail in conjunction with the patent drawings:
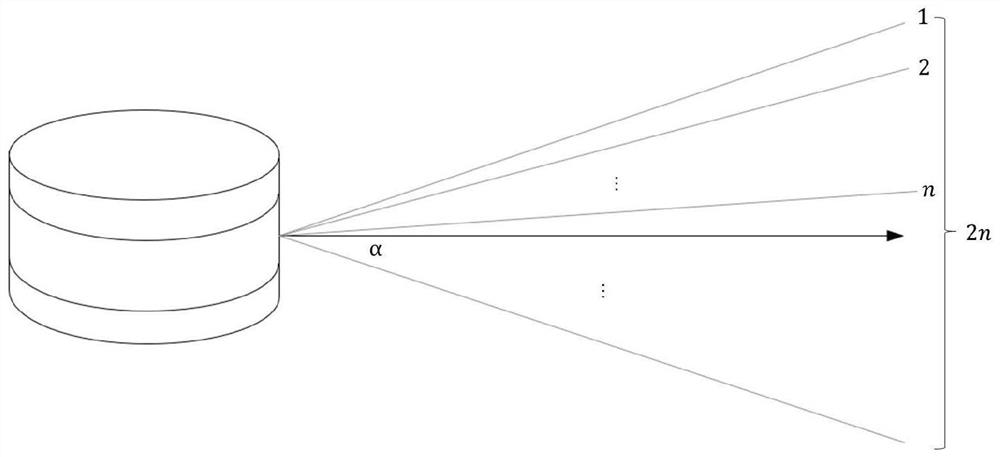
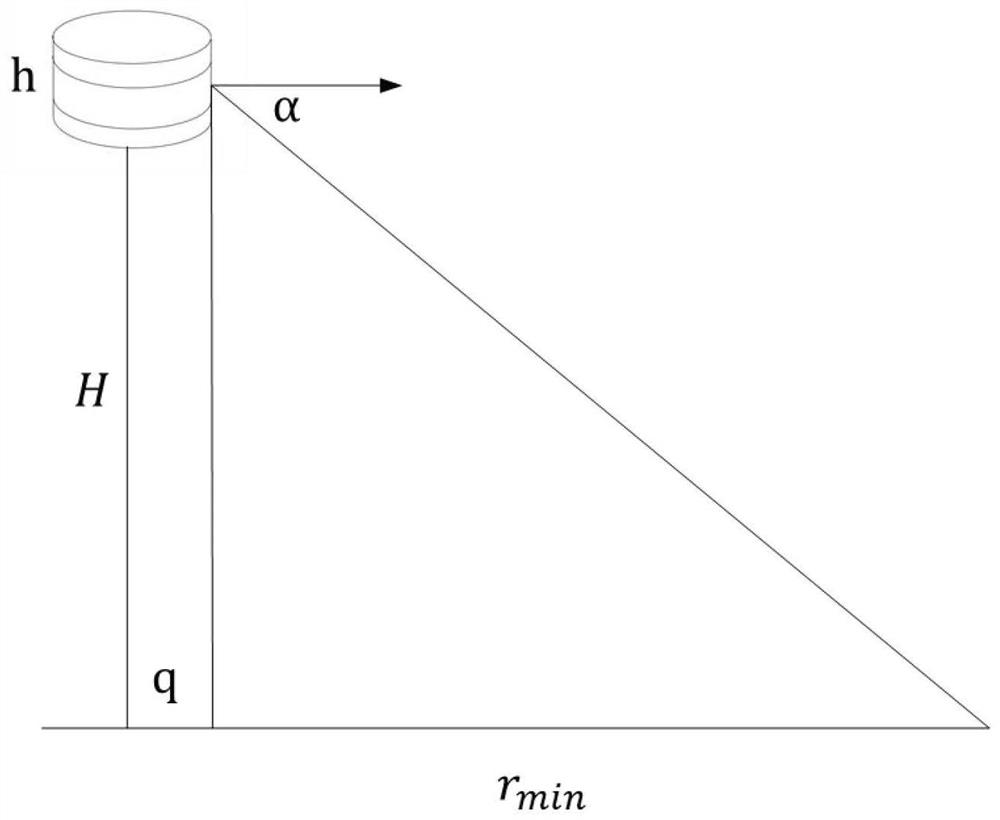
[0021] Step1: Layout of roadside lidar: such as figure 2 and 3 As shown, since the laser in the lidar has the maximum pitch angle ±α, it has the minimum range r m , that is, obstacles within the distance r will not be detected. When laying on the roadside, the minimum measuring range r min It will change with the height H of the lidar bracket, assuming that the height of the lidar itself is h and the radius is q:
[0022] r min =q+(h / 2+H) / tanα
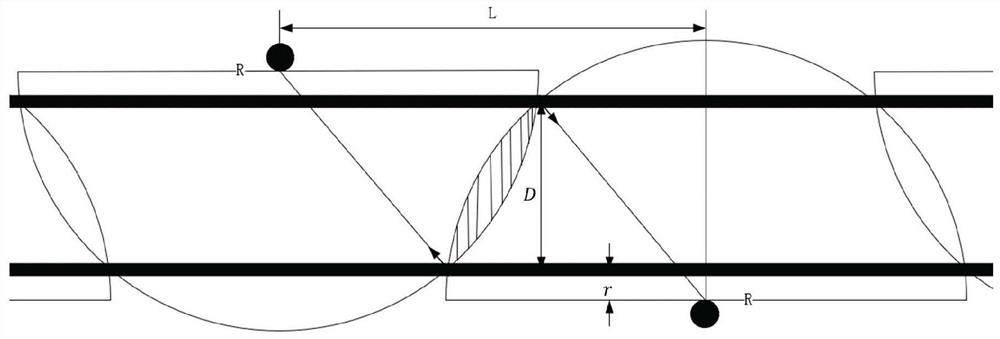
[0023] In addition, the roadside layout also needs to ensure that the lidar has no blind spots, so it is deployed on both sides of the road at intervals. Assuming that the maximum range of the lidar is R and the road width is D, then as figure 2 As shown, the distance between two adjacent lid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More