

Exoskeleton device and exoskeleton motion control method
A control method and exoskeleton technology, which can be applied to program control manipulators, manufacturing tools, and appliances that help people move around. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
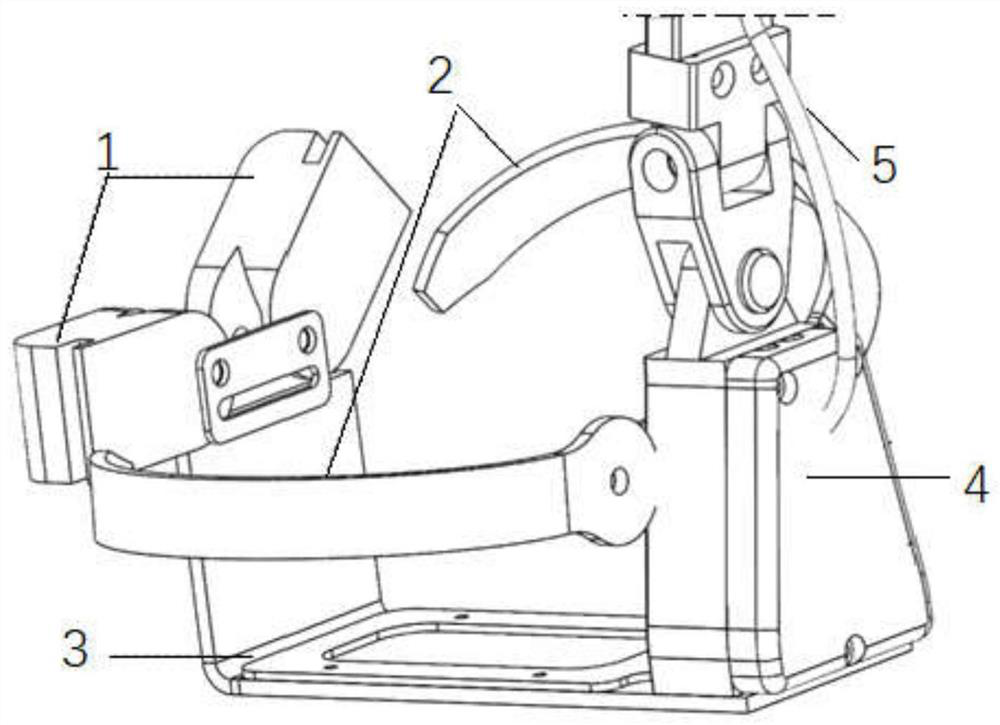
[0053] Such as figure 1 As shown, an exoskeleton device includes a foot member that is connected to the lower leg using an underactuated degree of freedom with a sagittal plane (no external input (such as a motor or hydraulic line) at the joint actively drives the joint). joint); said foot member includes:
[0054] The sole plate 3 is used to contact the ground;
[0055] The double-side boards are respectively arranged on both sides of the sole board, one side board 4 is provided with an energy buckle, and the other side board is equipped with a strap; the energy buckle 1 and the strap 2 can be buckled together;
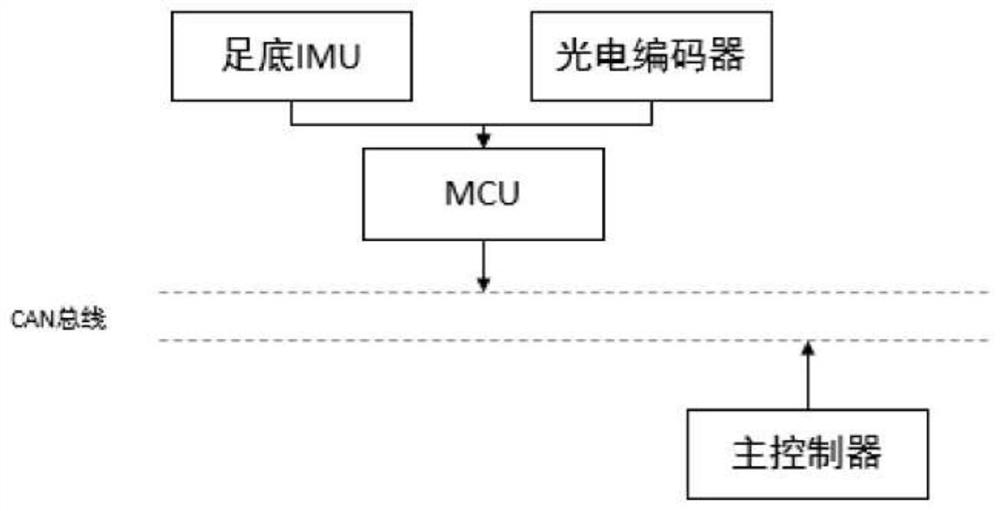
[0056] Infrared sensing device, built into one side board, is used to detect whether the sole board is in contact with the ground;
[0057] A photoelectric sensor, built into one side board, is used to detect the movement status of the sole board;
[0058] The foot IMU, built into the side panel, is used to detect the motion state of the human body on which the ex...
Embodiment 2
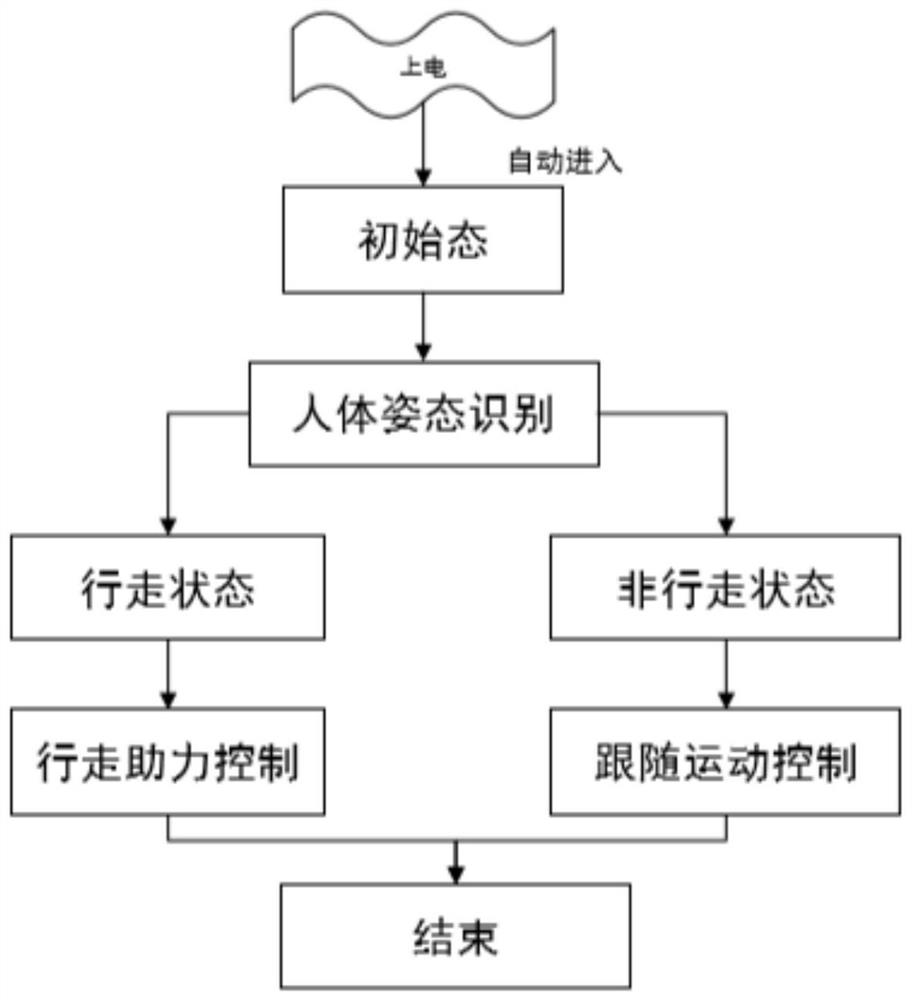
[0062] Such as image 3 As shown, an exoskeleton control method for an exoskeleton device. After a brief description, after power-on, the main controller is initialized, that is, the main controller automatically enters the initial state; human body posture recognition is performed; if it is detected as a walking state, walking assistance is performed Control; if it is detected as a non-walking state, follow-up motion control is performed.
[0063] Specifically include the following steps:
[0064] Initialize the main controller, and obtain the reference value of the infrared sensing device, the photoelectric sensor and the foot IMU in the foot component;
[0065] Obtain the lower limb joint angle information and the back IMU angle information in the current exoskeleton device, and the main controller determines the gait control scheme. Among them, the main controller determines the gait control scheme:
[0066] If the current angle data shows that the human body is in an u...
Embodiment 3
[0088] The specific implementation steps are as follows:
[0089] Step 1. Turn on the device. After the system is initialized, it will automatically enter the initial state, assist the wearer to stand upright, and obtain the benchmark values of various sensors.
[0090] Step 2. The established program identifies the motion posture state of the human body, and performs torque planning and motion control according to the motion state of the human body.
[0091] Step 3. Since this structure can assist in the recognition of the leg-raising action, after the leg-raising action is successfully identified, the motor that actively drives the joint instantly outputs a gradual torque to assist the human body to lift the leg. In the rest of the actions, since the interaction force is planned to be 0, there is no Obvious sense of stagnation. Thereby assisting the human body in the process of continuous exercise.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More