Nuclear industrial equipment disassembling and assembling robot and rapid disassembling and assembling method
A nuclear industry and robot technology, applied in the direction of metal processing equipment, metal processing, manufacturing tools, etc., can solve the problem of not being able to disassemble the whole machine, and achieve the effect of fast disassembly, fast positioning, and good safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings. Among them, the orientation nouns such as "up", "down", "left" and "right" mentioned in this article are preceded by figure 1 orientation as a reference.
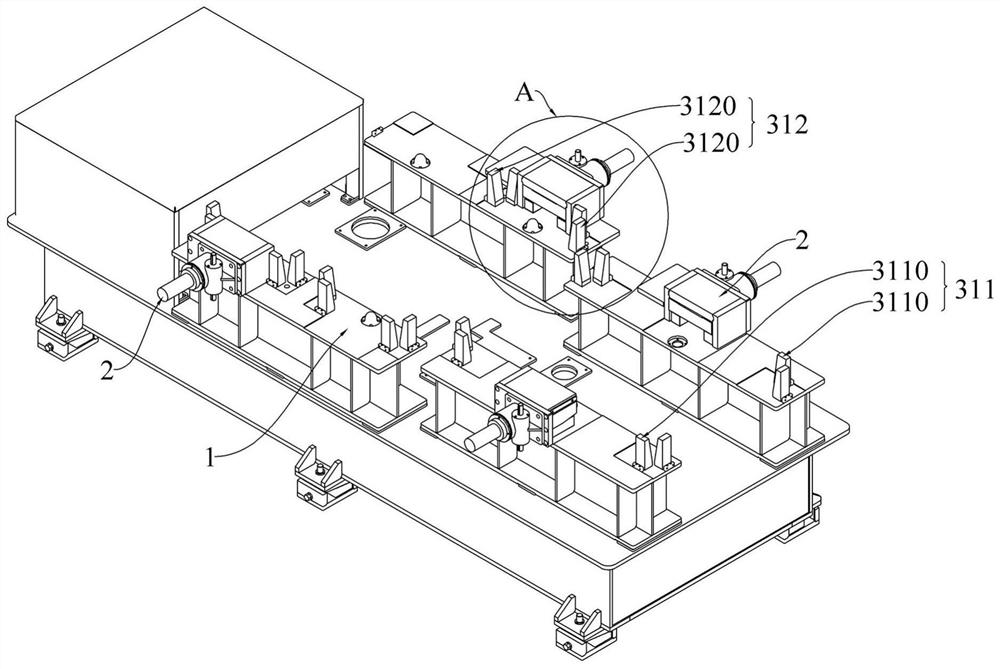
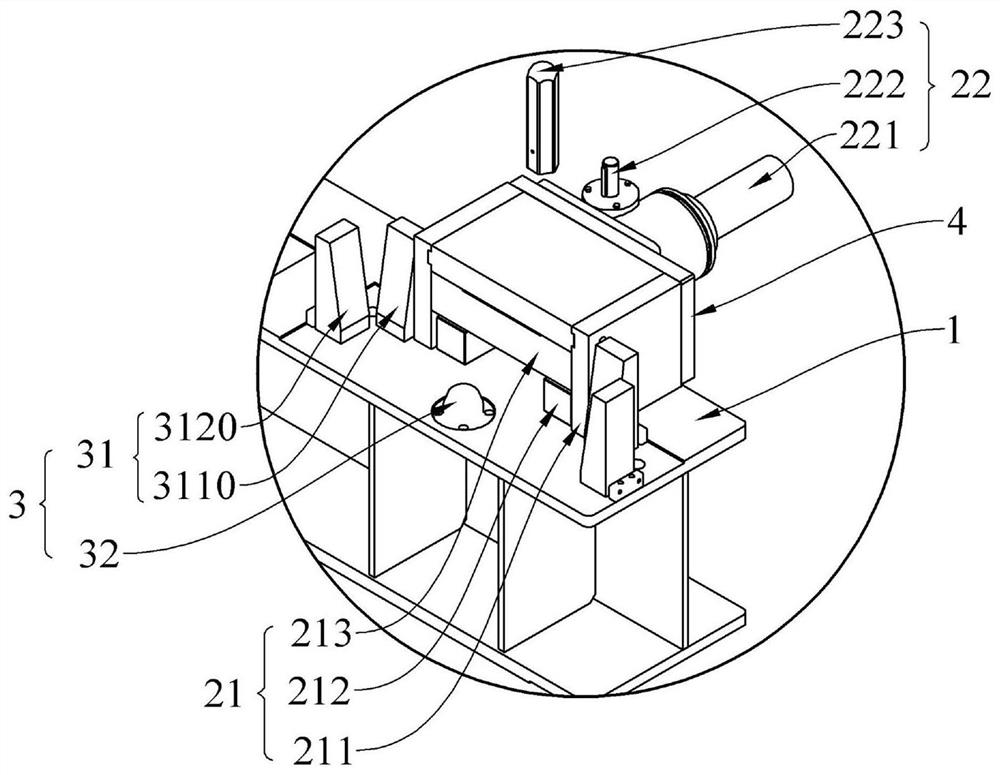
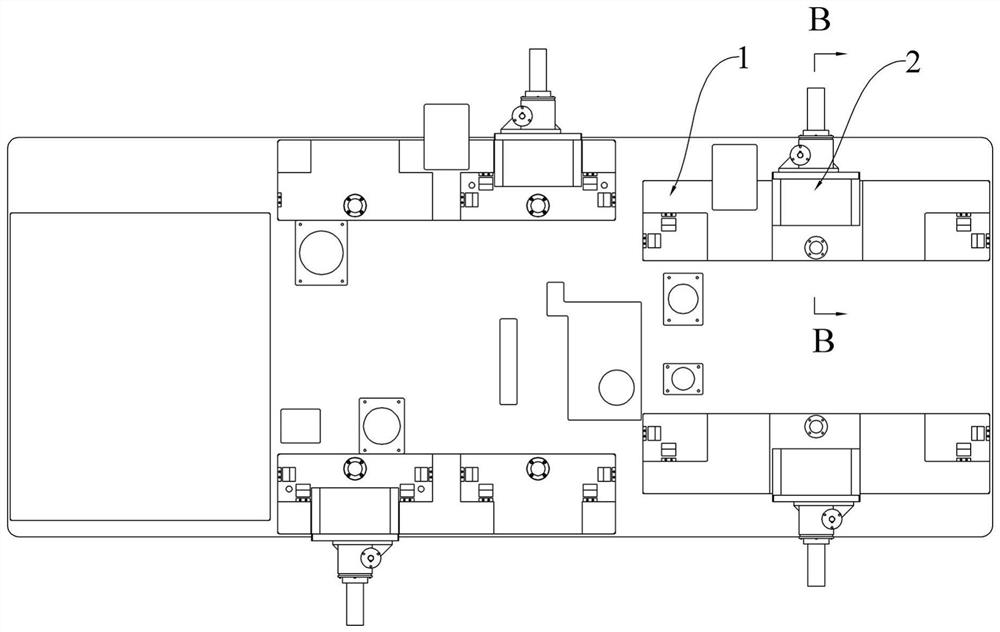
[0037] see figure 1 and figure 2 , the present invention provides a nuclear industry equipment disassembly robot, which includes a workbench 1, a manipulator (not shown) all arranged on the workbench 1, a plurality of disassembly structures 2, a plurality of positioning components 3, displacement sensors ( not shown) and a controller (not shown).
[0038] Specifically, the positioning assembly 3 includes a plurality of guide piles 31 and a plurality of positioning pins 32 respectively arranged on the workbench 1. The plurality of guide piles 31 are distributed at intervals around nuclear industrial equipme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com