Unmanned aerial vehicle recovery device and control method
A recycling device and drone technology, applied in the field of drones, can solve the problems of low work efficiency and long time, and achieve the effect of reducing labor intensity, avoiding manual assembly, and avoiding manual operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
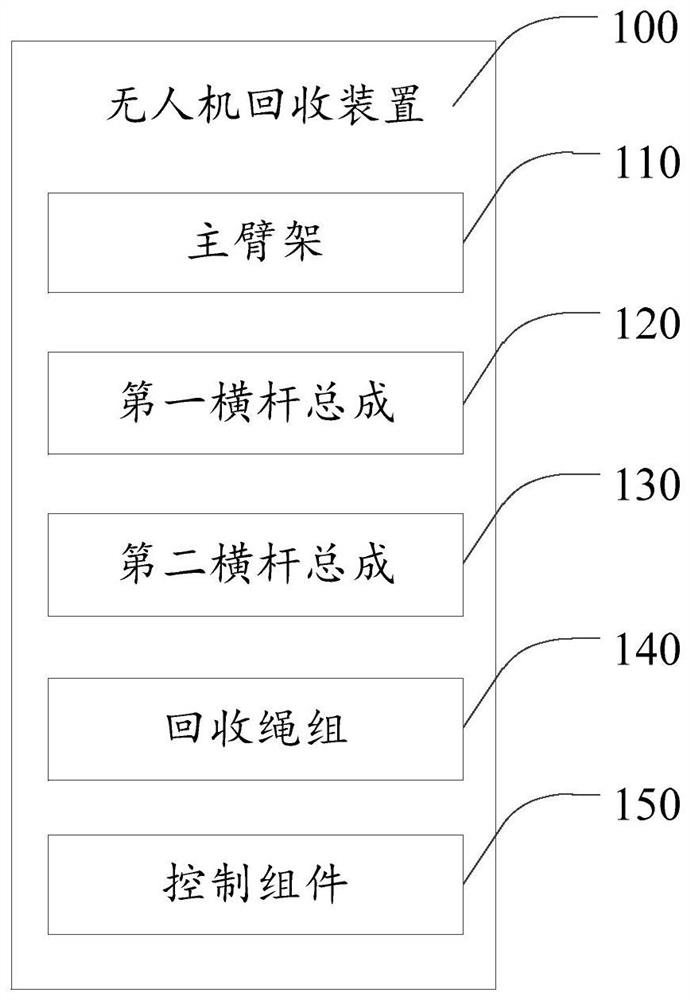
[0063] Such as figure 1 As shown, this embodiment provides a UAV recovery device 100, including: a main boom 110, a first crossbar assembly 120, a second crossbar assembly 130, a recovery rope set 140 and a control assembly 150, the main The boom 110 is provided with a first driving assembly 112, and the first driving assembly 112 is used to realize the expansion or retraction of the main boom 110; the first crossbar assembly 120 is provided with a second driving assembly 122, and the second driving assembly 122 is used to realize The first crossbar assembly 120 is deployed or retracted; the second crossbar assembly 130 is provided with a third drive assembly 132, and the third drive assembly 132 is used to realize the deployment or retraction of the second crossbar assembly 130; one end of the recovery rope set 140 The first crossbar assembly 120 is connected, and the other end is connected to the second crossbar assembly 130; the control assembly 150 is used to control the f...
Embodiment 2
[0066] Such as figure 2 , Figure 4 and Figure 6 As shown, in addition to the technical features of the above-mentioned embodiments, this embodiment further includes the following technical features:
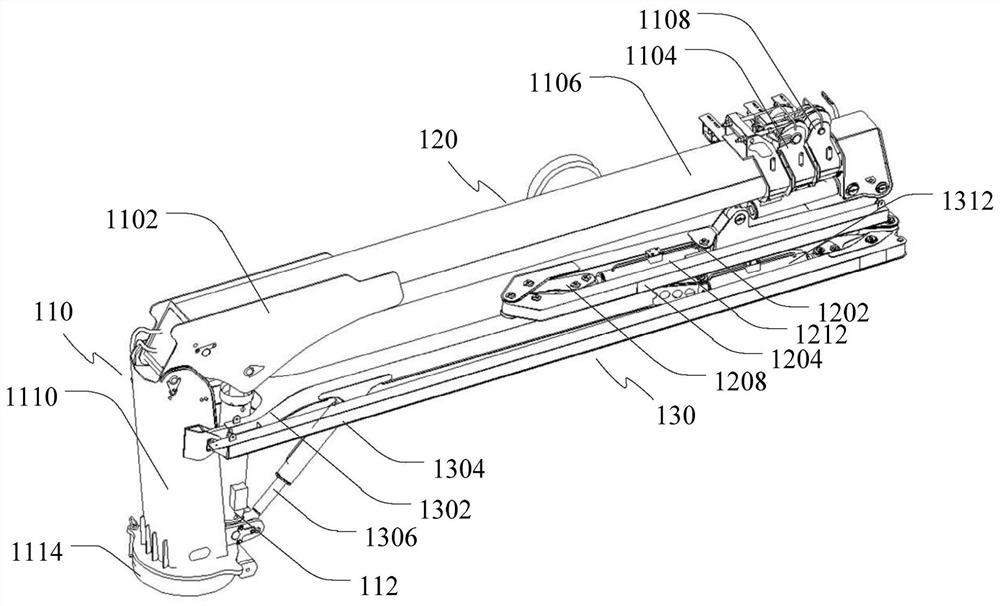
[0067] The first crossbar assembly 120 includes: a first section arm 1202 and a second section arm 1204, wherein, one end of the first section arm 1202 is connected with the main boom frame 110, and the other end is connected with the second section arm 1204, and the second section arm 1204 connects the recovery rope set 140 .
[0068] For example, the first crossbar assembly 120 is designed as a two-stage structure, including the first section arm 1202 and the second section arm 1204. When in use, the second section arm 1204 is unfolded to form a The angle can be about 180 degrees.
[0069] For another example, the first joint 1202 and the second joint 1204 may be hinged.
Embodiment 3
[0071] Such as Figure 4 , Figure 6 and Figure 9 As shown, in addition to the technical features of the above-mentioned embodiments, this embodiment further includes the following technical features:
[0072] The second driving assembly 122 includes: a first driving part 1206, a first connecting rod 1208, a second connecting rod 1210 and a second driving part 1212. One end of the first driving part 1206 is connected to the main arm frame 110, and the other end is connected to the first joint The arm 1202 is connected; one end of the first connecting rod 1208 is connected with the first section arm 1202, and the other end is connected with the second driving part 1212; one end of the second connecting rod 1210 is connected with the second section arm 1204, and the other end is connected with the second driving part 1212 Connection; one end of the second driving part 1212 is connected with the first joint 1202, and the other end is connected with the first connecting rod 120...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com